Kurze Beschreibung
● kleiner Schrittwinkel und hohe Präzision;
● Die Anzahl der Polpaare entspricht der Anzahl der Rotorzähne, die nach Bedarf in einem weiten Bereich geändert werden können.
● Die Wickelinduktivität ändert sich wenig mit der Rotorposition, die leicht zu erreichen ist.
● Axial Magnetisierungsmagnetkreis unter Verwendung einer neuen Art von permanentem Magnetmaterial mit hohem magnetischem Energieprodukt, das der Verbesserung der motorischen Leistung förderlich ist.
● Der Rotormagnet bietet Anregung; Es gibt keine offensichtliche Schwingung im gesamten Betriebsbereich.
Kurze Einführung technischer Merkmale
Allgemeine technische Merkmale
● Der Schrittmotor wird in Anlässen mit niedriger Geschwindigkeit verwendet-die Geschwindigkeit überschreitet 1000 Revolutionen pro Minute nicht (6666 pps bei 0,9 Grad), vorzugsweise zwischen 1000-3000 pps (0,9 Grad) und kann hier von einem Verzögerungsgerät verwendet werden. Wenn der Motor eine hohe Arbeitseffizienz und ein geringes Geräusch aufweist;
● Es ist am besten, den vollständigen Zustand für den Sprungmotor nicht zu verwenden, da die Schwingung im vollen Zustand groß ist.
● Der Spannungswert in der Motorspezifikation ist nicht der Spannungsspannungswert. Die spezifische Fahrspannung kann gemäß dem Stepper-Treiber ausgewählt werden (Empfehlung: 42 und unterhalb der Motoren verwenden 12-24 V, 57 Motoren verwenden DC 24 V-48V, 86 DC 48-80 V, 110 Der Motor einsetzt höher als DC 80V).
● Für Lasten mit großen Trägheitsmomenten sollte ein großer Rahmenmotor ausgewählt werden.
● Wenn sich der Motor in einer relativ Hochgeschwindigkeits- oder großen Trägheitslast befindet, beginnt er im Allgemeinen nicht mit der Arbeitsgeschwindigkeit, sondern verwendet eine allmähliche Frequenzerhöhung, um die Geschwindigkeit zu erhöhen. Erstens verliert der Motor nicht den Schritt, und zweitens kann er das Geräusch verringern und die Positionierungsgenauigkeit des Stopps verbessern.
● Für eine hohe Präzision sollte es gelöst werden, indem es mechanisch verlangsamt, die Motordrehzahl erhöht oder einen Treiber mit einer hohen Unterteilung mit einer hohen Unterteilung verwendet.
● Der Motor sollte bei Bedarf nicht in der Schwingungszone funktionieren. Er kann durch Ändern der Spannung und des Stroms oder des Hinzufügens einer Dämpfung gelöst werden.
● Wenn der Motor unter 600 pps (0,9 Grad) arbeitet, sollte er durch geringe Strom, große Induktivität und niedrige Spannung angetrieben werden.
机械技术特性
● Beim Installieren/Entfernen des Wellenends eines Trittmotors mit einem Kupplungsteil nicht direkt das Wellenende mit einem Hammer direkt treffen. (Der Hammer trifft direkt auf das Wellenende, und der Encoder am anderen Ende der Schrittmotorwelle kann beschädigt werden);
● Versuchen Sie, die Wellenenden auf den besten Zustand auszurichten, um eine gute Konzentrik zu gewährleisten, da ansonsten eine Vibration auftreten kann, das Lager kann beschädigt werden und die Schacht kann sogar gebrochen werden.
● Der Motor kann an Stellen verwendet werden, die durch Wasser- oder Öltropfen angegriffen werden, aber nicht vollständig wasserdicht oder öldicht. Die Standardschutzstufe ist IP54. Daher sollte der Motor nicht in einer Umgebung platziert oder verwendet werden, die durch Wasser oder Öl korrodiert ist (falls erforderlich für einen besonderen Schutzniveau, bitte kontaktieren Sie uns!).
● Wenn der Motor an ein Reduktionsgetriebe angeschlossen ist, sollten Öldichtungen hinzugefügt werden, wenn ein Schrittmotor verwendet wird, um zu verhindern, dass das Reduktionsrad in den Schrittmotor eintritt.
● Tauchen Sie nicht in Öl oder Wasser ein. Stellen Sie sicher, dass das Kabel aufgrund der externen Biegemittel oder seines eigenen Gewichts, insbesondere am Kabelauslass oder der Verbindung, nicht dem Moment oder einer vertikalen Belastung ausgesetzt ist.
● Wenn sich der Motor bewegt, sollte das Kabel (dh das mit dem Motor konfigurierte Kabel) fest an einem stationären Teil (relativ zum Motor) festgelegt werden, und ein zusätzliches Kabel, das in der Kabelunterstützung belastet ist, sollte verwendet werden, um ihn zu verzögern, damit die Biegespannung auf das Minimum reduziert werden kann. Der Radius des Kabel Ellbogen sollte so groß wie möglich sein
Hybrid-Trittmotor ---- 28 HB 1,8 °

Artikel |
 Spezifikationen Spezifikationen
|
Schrittwinkel |
1.8。 |
Schrittwinkelgenauigkeit |
± 5% (Vollschritt , Keine Last) |
Widerstandsgenauigkeit |
± 10% |
Induktivitätsgenauigkeit |
± 20% |
Temperaturanstieg |
80。C max. (Nennstrom , 2 Phase auf) |
Umgebungstemperatur |
-20。C ~+50 。c |
Isolationsresistenz |
100 mΩmin. , 500VDC |
Dielektrische Stärke |
500 VAC für eine Minute |
Wellenradialspiel |
0,02 Max. (450 G-Last) |
Axialspiel des Schaftes |
0,08 Max. (450 G-Last) |
Isolationsklasse |
B |
Technikspezifikation
Serie Modell |
Motorlänge |
Bewertungsstrom |
Phasenwiderstand |
Phaseninduktivität |
Drehmoment halten |
Bleidraht |
Trägheit der Rotor |
Motorgewicht |
L (mm) |
(A) |
(Ω) |
(MH) |
(Kg.cm) |
(NEIN.) |
(G.Cm²) |
(G) |
28HB31F068B |
31 |
0.68 |
5.6 |
3.4 |
0.6 |
4 |
9 |
110 |
28HB31F095B |
31 |
0.95 |
2.8 |
2.3 |
0.6 |
4 |
9 |
110 |
28HB44F095B |
44 |
0.95 |
4.7 |
3.7 |
0.9 |
4 |
12 |
140 |
28HB44F068B |
44 |
0.68 |
6.8 |
4.9 |
0.95 |
4 |
12 |
140 |
28HB51F095B |
51 |
0.95 |
5.6 |
5.0 |
1.1 |
4 |
18 |
180 |
28HB51S095B |
51 |
0.95 |
4.6 |
1.8 |
0.9 |
4 |
18 |
180 |
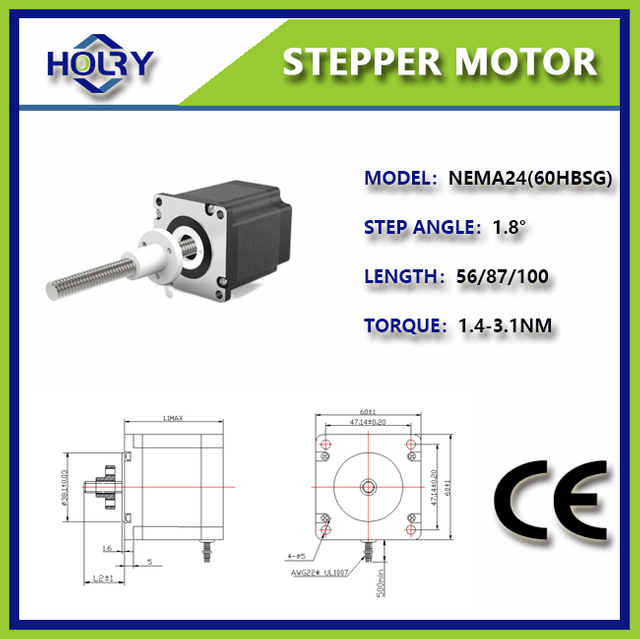
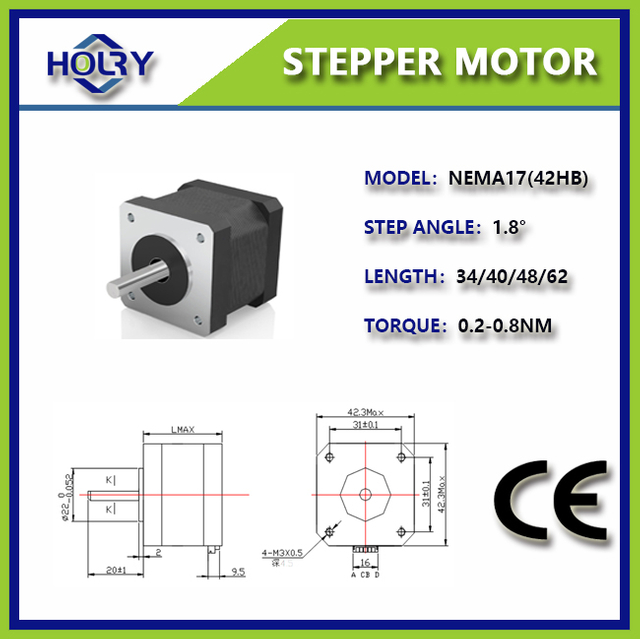
Abmessungen

Schaltplan

 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు