Deskripsi singkat
● Sudut langkah kecil dan presisi tinggi;
● Jumlah pasangan tiang sama dengan jumlah gigi rotor, yang dapat diubah dalam kisaran luas sesuai kebutuhan;
● Induktansi belitan sedikit berubah dengan posisi rotor, yang mudah untuk mencapai kontrol operasi terbaik;
● Sirkuit magnetik magnetisasi aksial, menggunakan jenis baru bahan magnet permanen dengan produk energi magnetik tinggi, yang kondusif untuk peningkatan kinerja motor;
● Magnet rotor memberikan eksitasi; Tidak ada osilasi yang jelas di seluruh area operasi.
Aturan penamaan
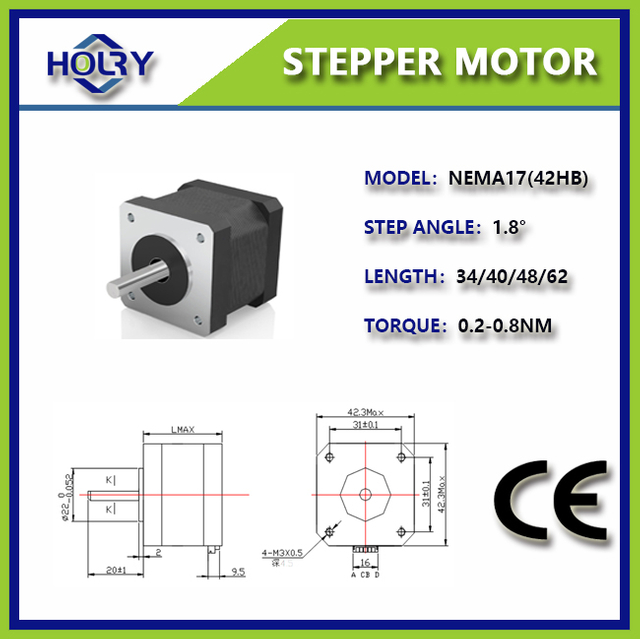
42 HB 40 F 105 B- -06
○ 1 ○ 2 ○ 3 ○ 4 ○ 5 ○ 6 ○ 7
○ 1: 42: Bingkai motor: 42*42mm
○ 2: HB: Motor loncatan hibrida
○ 3: 40: Panjang tubuh motorik
○ 4: F: Jumlah lead: empat baris, s: enam baris, E: 8 baris
○ 5: 105: Nilai Motor Nilai Arus 1.5A
○ 6: B: Ada kawat datar pada poros motor, CL adalah singkatan dari Gear D adalah singkatan dari Double Output Shaft PJ adalah singkatan dari Keyway
○ 7: 06: Angka turunan
Pengenalan singkat karakteristik teknis
Karakteristik teknis umum
● Motor loncatan digunakan dalam kesempatan berkecepatan rendah --- kecepatan tidak melebihi 1000 revolusi per menit, (6666pps pada 0,9 derajat), lebih disukai antara 1000-3000pps (0,9 derajat), dan dapat digunakan di sini oleh perangkat yang menghambat. Ketika motor memiliki efisiensi kerja yang tinggi dan kebisingan rendah;
● Yang terbaik adalah tidak menggunakan keadaan langkah penuh untuk motor loncatan, karena getarannya besar dalam keadaan langkah penuh;
● Nilai tegangan dalam spesifikasi motor bukan nilai tegangan penggerak. Tegangan mengemudi spesifik dapat dipilih sesuai dengan driver stepper (rekomendasi: 42 dan di bawah motor menggunakan 12-24V, 57 motor menggunakan DC 24V-48V, 86 Gunakan DC 48-80V, 110 Motor mengadopsi lebih tinggi dari DC 80V)
● Untuk beban dengan momen inersia yang besar, motor ukuran bingkai besar harus dipilih;
● Ketika motor berada dalam beban inersia yang relatif tinggi atau besar, umumnya tidak dimulai pada kecepatan kerja, tetapi menggunakan peningkatan frekuensi bertahap untuk meningkatkan kecepatan. Pertama, motor tidak kehilangan langkah, dan kedua, dapat mengurangi kebisingan dan meningkatkan akurasi posisi berhenti;
● Untuk presisi tinggi, harus diselesaikan dengan melambat secara mekanis, meningkatkan kecepatan motor, atau menggunakan driver dengan nomor subdivisi tinggi;
● Motor tidak boleh bekerja di zona getaran, jika perlu, dapat diselesaikan dengan mengubah tegangan, arus atau menambahkan redaman;
● Ketika motor bekerja di bawah 600pps (0,9 derajat), itu harus didorong oleh arus kecil, induktansi besar, dan tegangan rendah.
Karakteristik teknis mekanis
● Saat memasang/melepas ujung poros motor loncatan dengan bagian kopling, jangan langsung mengenai ujung poros dengan palu. (Palu mengenai ujung poros secara langsung, dan enkoder di ujung lain poros motor stepper dapat rusak);
● Cobalah untuk menyelaraskan ujung poros dengan kondisi terbaik untuk memastikan konsentrisitas yang baik, jika tidak getaran dapat terjadi, bantalan mungkin rusak, dan poros bahkan mungkin rusak;
● Motor dapat digunakan di tempat-tempat yang akan diserang oleh air atau tetesan minyak, tetapi tidak sepenuhnya tahan air atau tahan minyak. Tingkat perlindungan default adalah IP54. Oleh karena itu, motor tidak boleh ditempatkan atau digunakan dalam lingkungan yang dikorosi oleh air atau minyak (jika perlu untuk tingkat perlindungan khusus, silakan hubungi kami!);
● Jika motor terhubung ke gigi reduksi, segel oli harus ditambahkan saat menggunakan motor stepper untuk mencegah gigi reduksi memasuki motor stepper;
● Jangan merendam kabel motor dalam oli atau air. Pastikan kabel tidak mengalami momen atau beban vertikal karena gaya lentur eksternal atau beratnya sendiri, terutama di outlet kabel atau koneksi.
● Ketika motor bergerak, kabel (yaitu, yang dikonfigurasi dengan motor) harus ditetapkan dengan kuat ke bagian stasioner (relatif terhadap motor) dan kabel tambahan yang dimuat dalam dukungan kabel harus digunakan untuk menunda, sehingga tegangan lentur dapat dikurangi seminimal mungkin. Jari -jari siku kabel harus sebesar mungkin
Hibrida Stepping Motor  --- 42HW 3.75 °
--- 42HW 3.75 °

Barang |
Spesifikasi |
Sudut langkah |
3.75。 |
Akurasi sudut langkah |
± 5% (langkah penuh, tidak ada beban) |
Akurasi resistensi |
± 10% |
Akurasi induktansi |
± 20% |
Kenaikan suhu |
80。C maks (arus peringkat, 2 fase aktif) |
Suhu sekitar |
-20。C ~+50 。c |
Resistensi isolasi |
100 mmin. , 500VDC |
Kekuatan dielektrik |
500vac selama satu menit |
Permainan radial poros |
0,02Max. (450 G-LOAD) |
Permainan aksial poros |
0,08Max. (450 G-LOAD) |
Kelas isolasi |
B (130 °) |
Spesifikasi Teknik
Seri Model |
Panjang motor |
Tingkat tegangan |
Nilai arus |
Resistensi fase |
Induktansi fase |
Memegang torsi |
Kawat timah |
Inersia rotor |
Berat motorik |
L (mm) |
(V) |
(A) |
(Ω) |
(MH) |
(Kg.cm) |
(TIDAK.) |
(G.CM⊃2;) |
(G) |
42HW25DF08AB |
25 |
9.6 |
0.8 |
12 |
12 |
0.7 |
4 |
24 |
150 |
42HW34DS03AB |
34 |
12 |
0.3 |
40 |
18 |
1.2 |
6 |
34 |
200 |
42HW34DF06AB |
34 |
12 |
0.6 |
20 |
15 |
2.0 |
4 |
34 |
200 |
42HW40DF04AB |
40 |
12 |
0.4 |
30 |
40 |
3.8 |
4 |
54 |
220 |
42HW40DF105AB |
40 |
4.5 |
1.5 |
3.0 |
3.5 |
2.3 |
4 |
54 |
220 |
42HW48DS04AB |
48 |
12 |
0.4 |
30 |
25 |
3.2 |
6 |
68 |
280 |
42HW48DF102AB |
48 |
3.6 |
1.2 |
3 |
5 |
4.5 |
4 |
68 |
280 |
42HW48DF205AB |
48 |
3.1 |
2.5 |
1.25 |
1.8 |
4.8 |
4 |
68 |
280 |
Ukuran

Diagram ka5d=300mm

 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు