Die Holry 'Brand of Hybrid Stepper Motor Linear Actuators kom in vyf groottes, van 28 mm vierkante tot 86 mm vierkant, wat ooreenstem met die NEMA -grootte 11, grootte 14, grootte 17, grootte 23, en grootte 34. Elke grootte het drie tot drie vormfaktore beskikbaar - gevange, nie -kapings en 'n eksterne lineêre weergawe.
Daar is meer as twintig verskillende reise per stap beskikbaar. 0001563 duim (0,00397 mm) tot 0,003937 duim (1 mm). Mikrostepping kan gebruik word vir 'n selfs fyner resolusie.
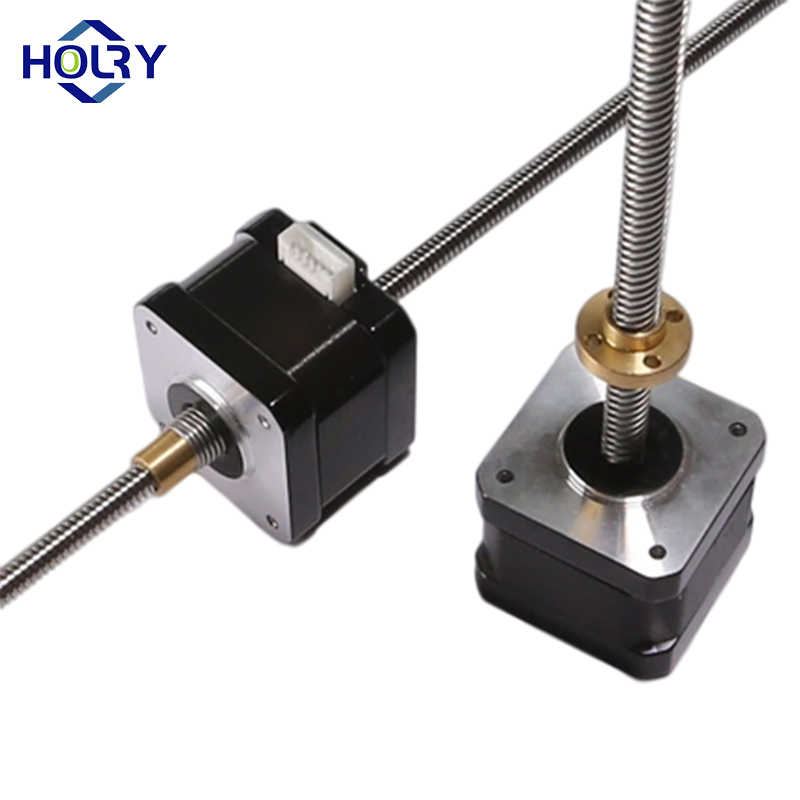
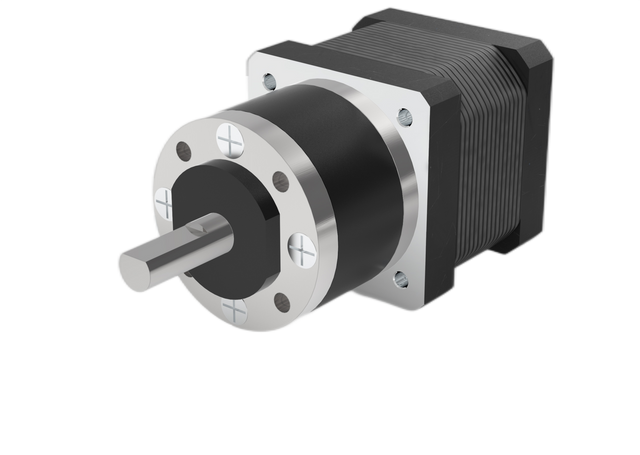
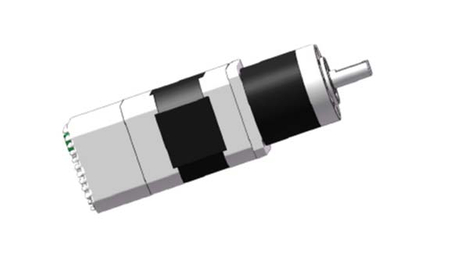
Die NEMA 24 -steppermotor het 'n geïntegreerde 15 cm (5,9 ″) draadstaaf as sy uitsetas, wat dit omskep in 'n lineêre aktuator wat die oop lusposisionering kan doen.
Die ingeslote reismoer het vier monteergate en beweeg 0,04 mm (40μm, 1,57 miljoen) per volle stap; Fyner resolusie kan bereik word met mikrostepping.
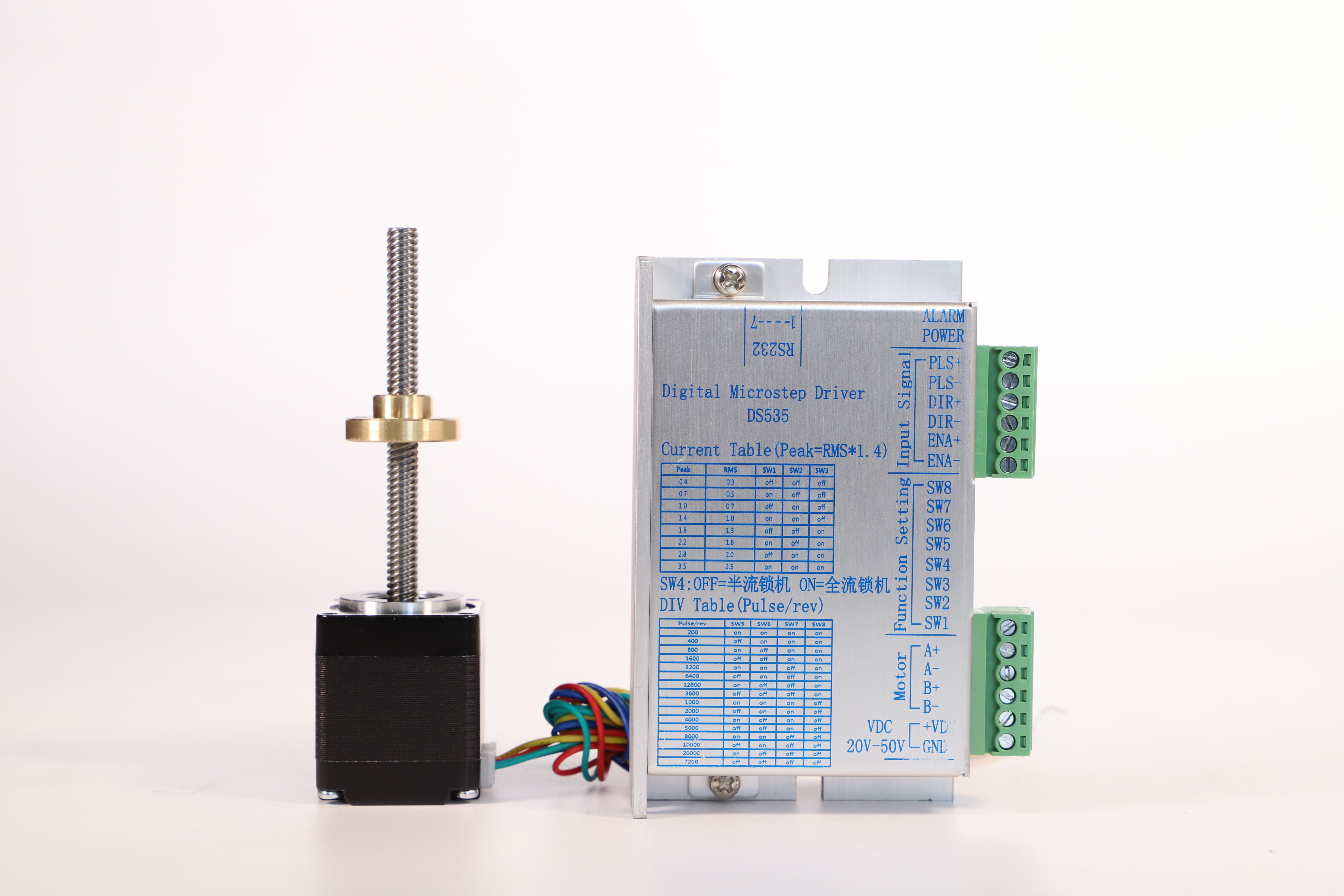
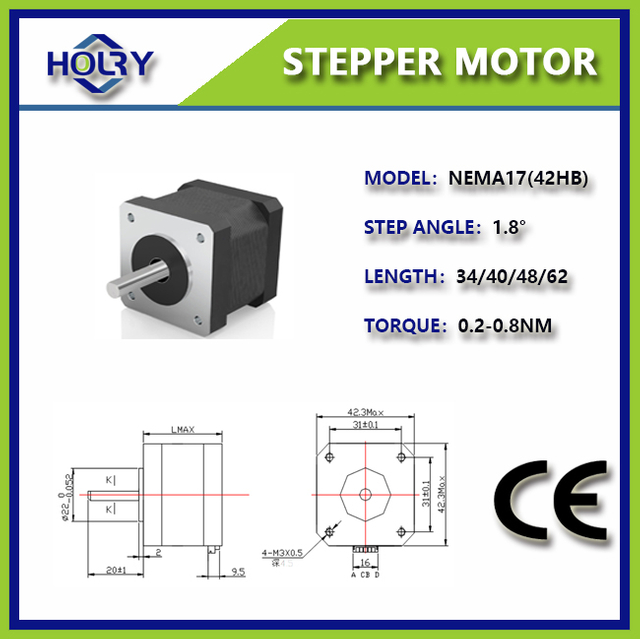
Die trapmotor het 'n staphoek van 1,8 ° 200 stappe/omwenteling en elke fase trek 2 A/fase, wat 'n wringkrag van 5,5 kg (79 oz.in) moontlik maak
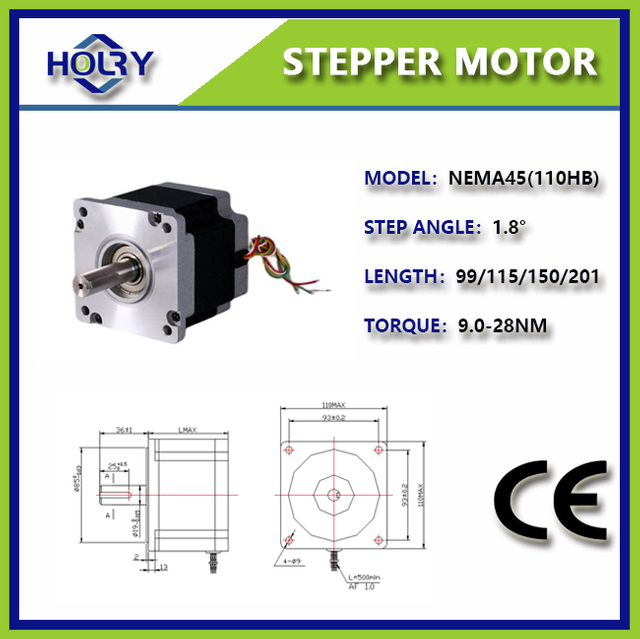
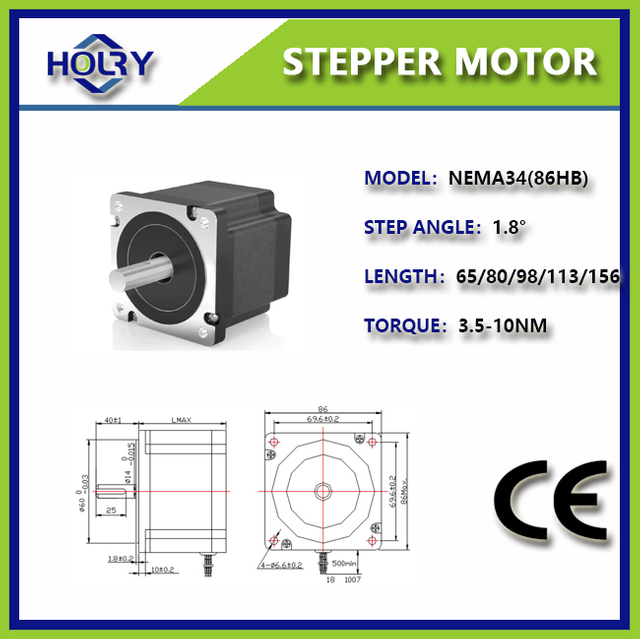
Grootte:
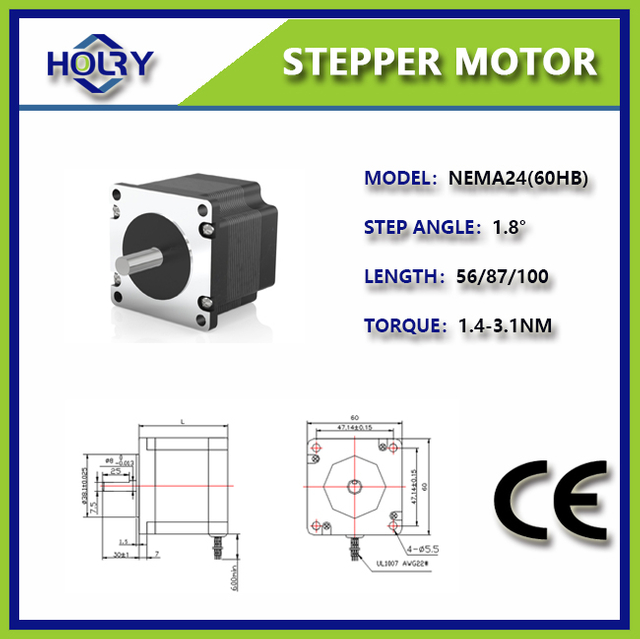
Die '24 ' in NEMA 24 dui die grootte daarvan aan, wat beteken dat dit 'n raamgrootte van 60 mm (60 mm) vierkantig het. Hierdie gestandaardiseerde groottestelsel help om verenigbaarheid te verseker met montagebeugels en ander hardeware.
Funksies
Kenmerke / voordele
Maklike integrasie
Baie makliker om in 'n toepassing te integreer; kan gekoppel word aan programmeerbare beheerders/drywers.
Meer akkuraatheid
Voorsien 'n hoër vlak van akkuraatheid in bewegingsbeheer (snelheid, wringkrag en krag kan in verskillende stadiums tydens beweging verander word).
Veiliger
Aktuators is nie vatbaar vir lekkasies of besoedeling nie - veiliger, skoner en geriefliker.
Laer koste
Meer ekonomies op die lange duur, benodig minder onderhoud, is robuus en maklik om te bedryf / installeer, hou langer en kan betroubaar gebruik word in verskillende omgewingstoestande.
Ander voordele
Met eenvoudige vinnige verbindingsdrade en kabel, kan aktuators maklik saamgestel word, meer kompak is en stil werk.
Hier is 'n paar sleutelkenmerke en kenmerke van 'n NEMA 24 -stappermotor:
Grootte:
Die '24 ' in NEMA 24 dui die grootte daarvan aan, wat beteken dat dit 'n raamgrootte van 60 mm (60 mm) vierkantig het. Hierdie gestandaardiseerde groottestelsel help om verenigbaarheid te verseker met montagebeugels en ander hardeware.
Traphoek:
Stapmotors beweeg in afsonderlike stappe, en die traphoek van 'n NEMA 24 -motor is gewoonlik 1,8 grade per stap. Dit beteken dat dit 1,8 grade met elke stap draai, wat dit geskik maak vir toepassings wat presiese beheer en posisionering benodig.
Hou wringkrag vas:
NEMA 24 -motors kom in verskillende modelle met verskillende wringkragbeoordelings. Die wringkrag is die hoeveelheid wringkrag wat die motor kan uitoefen om sy posisie te behou wanneer dit stilstaande is. Die spesifieke wringkrag van die motor hang af van die ontwerp en spesifikasies van die motor.
Spanning en stroom:
Die spannings- en stroomvereistes van 'n NEMA 24 -motor kan afhang van die model en toepassing. Dit is belangrik om die motor die regte spanning en stroom te voorsien om behoorlike werkverrigting te verseker.
Bedrading:
NEMA 24 trapmotors het gewoonlik vier of ses drade wat gebruik word om die motor te beheer. Behoorlike bedrading en verbinding met 'n trapmotorbestuurder of beheerder is noodsaaklik vir die werking daarvan.
Montering:
NEMA 24 -motors het 'n gestandaardiseerde bevestigingspatroon, wat dit makliker maak om dit aan verskillende toerusting en masjinerie te heg. Die monteergate is gewoonlik op spesifieke afstande en plekke op die motor se raam geplaas.
Aansoeke:
NEMA 24 steppermotors word gereeld gebruik in toepassings wat presiese beheer van rotasiebeweging benodig, soos in CNC (rekenaarnualiese beheer) masjiene vir sny en frees, 3D-drukkers vir laag-vir-laag drukwerk en robotstelsels vir akkurate posisionering.
Stepper Motorbestuurder:
Om 'n NEMA 24 -stappermotor te bestuur, benodig u 'n trapmotorbestuurder of -beheerder. Hierdie toestelle bied die nodige elektriese pulse om die motor se rotasie en rigting te beheer.
Microstepping:
Sommige steppermotorbestuurders ondersteun mikrostepping, wat 'n fyner beheer van die posisie van die motor moontlik maak deur elke stap in kleiner inkremente te verdeel. Dit kan die motor se totale werkverrigting verbeter, veral in toepassings waar gladde beweging noodsaaklik is.
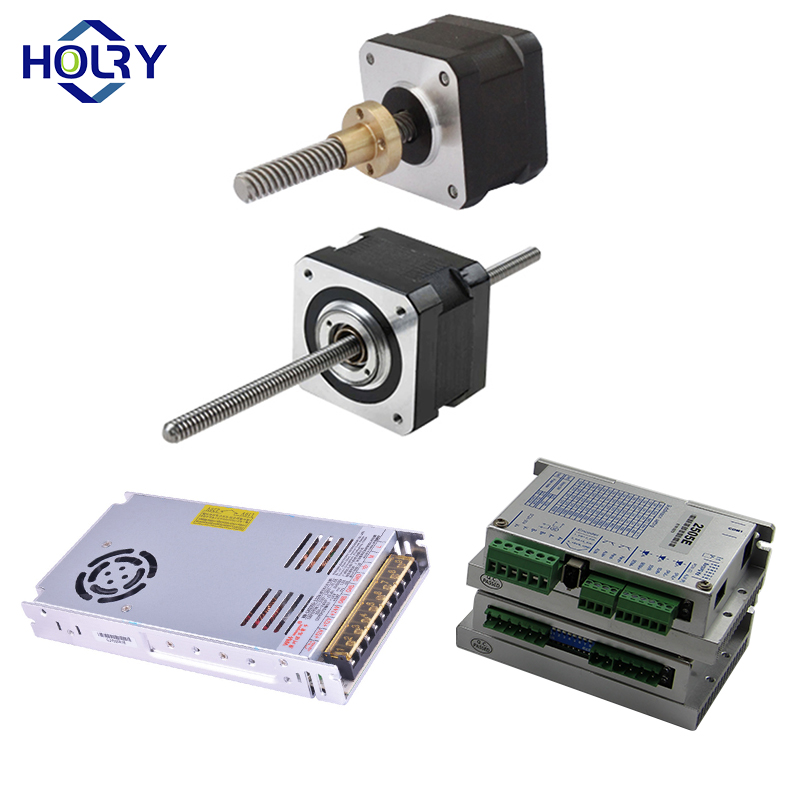
Konfigurasies
Konfigurasies
Kyk gerus na ons trapmotor -katalogus vir volledige spesifikasies.
Die belangrikste verskille tussen 'n eksterne lineêre, nie-kapings- en gevangene motor is,
Uiterlik
Nie-kapitaal
Gevangene
Die eksterne lineêre motor het die skroef op die rotor aangebring, sodat dit buite die motorliggaam draai, soos 'n GS -motor.
Die nie -gevangenisskroef beweeg vrylik in en uit die motorliggaam en draai nie.
Die gevangene het 'n kort skroef wat meestal binne die motorliggaam gehou word, gekoppel aan 'n spline.
Eksterne lineêre motors is die meeste soortgelyk aan gemotoriseerde relings waar die moer deur 'n aangedrewe koets -eenheid vervang word. Nie -gevangene is oor die algemeen die kortste montering van die totale lengte, terwyl die gevangene die langste is.
Eindmasjienopsies
Skroefmoer -opsies
Kontak Holry vir pasgemaakte oplossings.
Appilcations
NEMA 24 Stepper Motors Toepassing
NEMA 24 Stepper Motors vind 'n wye verskeidenheid toepassings in verskillende industrieë as gevolg van hul presiese beheer oor rotasiebeweging en veelsydigheid. Hier is 'n paar algemene toepassings vir NEMA 24 trapmotors:
CNC -masjinerie
NEMA 24 trapmotors word gereeld gebruik in rekenaarnumeriese beheer (CNC), insluitend freesmasjiene, draaibanke en routers. Dit bied die presiese beheer wat benodig word om die snygereedskap of werkstukke akkuraat te posisioneer.
3D -drukwerk
In 3D -drukkers word NEMA 24 -motors gebruik om die beweging van drukkoppe, bouplatforms en ander komponente te beheer. Hul vermoë om in presiese inkremente te beweeg, is noodsaaklik vir die skep van ingewikkelde 3D-gedrukte voorwerpe.
Robotika
NEMA 24 Stepper Motors speel 'n belangrike rol in verskillende robotstelsels, waaronder robotarms, pluk-en-plek-masjiene en outomatiese monteerlyne. Hul vermoë om met presisie en betroubaarheid te beweeg, is noodsaaklik vir robotbewegingsbeheer.
Tekstielmasjinerie
In die tekstielbedryf word NEMA 24 -trapmotors gebruik in masjiene soos naaimasjiene, borduurmasjiene en stofknipsels. Dit maak 'n presiese beheer van draadspanning, naaldbeweging en stofvoeding moontlik.
Mediese toestelle
Steppermotors word aangetref in mediese toerusting soos laboratorium -outomatiseringstelsels, mediese beeldtoestelle en robotchirurgiese instrumente. Die akkuraatheid en betroubaarheid daarvan is noodsaaklik vir delikate mediese prosedures.
Laboratorium -outomatisering
NEMA 24 trapmotors word in laboratorium -outomatiseringstoerusting gebruik vir take soos vloeibare hantering, monsterverwerking en outomatiese toetsing. Dit verseker presiese en herhaalbare bewegings.
Lugvaart
In lug- en ruimtevaart -toepassings kan steppermotors gevind word in stelsels soos satellietskottelposisionering, antenna -beheer en outomatiese inspeksietoerusting. Hul vermoë om in harde omgewings te werk en akkuraatheid te handhaaf, is van kritieke belang.
Outomatiese verpakking
Stapmotors word in verpakkingsmasjinerie gebruik om prosesse soos vulling, verseëling, etikettering en sorteer te beheer. Dit verseker konsekwente en betroubare verpakking van produkte.
Motorvervaardiging
NEMA 24 trapmotors word in motorvervaardiging gebruik vir take soos sweiswerk, skilder en outomatisering van die monteerlyn. Dit help om die akkuraatheid en kwaliteit van motoronderdele te verseker.
Kamera- en fotografietoerusting
In professionele fotografie- en filmvervaardigingstoerusting word steppermotors gebruik om funksies soos fokus en zoom in kameralense, sowel as kamera -tuigbewegings, te beheer.
Teleskoopbevestigings
In amateur- en professionele teleskope word steppermotors gebruik om die beweging van die teleskoopmontering te beheer, waardeur sterrekundiges hemelse voorwerpe akkuraat kan opspoor.
Industriële outomatisering
NEMA 24 trapmotors word in verskillende industriële outomatiseringstoepassings gebruik, insluitend vervoerstelsels, materiaalhantering en outomatiese toets- en inspeksietoerusting.
Dit is slegs 'n paar voorbeelde van hoe NEMA 24 trapmotors in verskillende industrieë en toepassings gebruik word. Hul vermoë om presiese beheer, herhaalbare beweging en betroubaarheid te bied, maak dit 'n gewilde keuse vir 'n wye verskeidenheid take wat akkurate posisionering en outomatisering benodig.
Vrae
Vrae
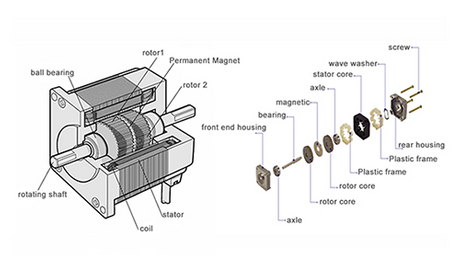
Wat is Stepper Motor en hoe dit werk?
Die trapmotor is 'n elektromagnetiese toestel wat digitale pulse omskakel in meganiese asrotasie. Voordele van stapmotors is lae koste, hoë betroubaarheid, hoë wringkrag teen lae snelhede en 'n eenvoudige, robuuste konstruksie wat in byna enige omgewing werk.
Wat is die verskil tussen DC en Stepper Motor?
Sommige GS -motors genereer ook hoë wringkragte teen lae snelhede, maar is meer geskik vir deurlopende gebruike, aangesien hul wringkrag konstant is oor hul snelheidsbereik. Die belangrikste verskil is dat, hoewel
steppermotors harder van rus kan stoot , DC -motors meer volgehoue produksie het.
Hoe word steppermotors beheer?
Waarom word dit Stepper Motor genoem?
Steppermotors word so genoem omdat elke pols van elektrisiteit die motor een stap draai. Steppermotors word deur 'n bestuurder beheer, wat die pulse in die motor stuur, wat veroorsaak dat dit draai.
Wat is staphoek?
Staphoek word gedefinieer as die hoek waardeur die trapmotoras draai vir elke opdragpuls.
Wat is die wringkrag van die stepper?
As eksterne krag op 'n trapmotor aangebring word wanneer dit gestop word, maar energiek is, werk die aantreklike krag wat tussen die rotor en die stator opgewek word om die stopposisie van die motor te behou . Hierdie wringkrag van weerstand aan die eksterne krag word die wringkrag genoem.
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు