Paglalarawan ng produkto
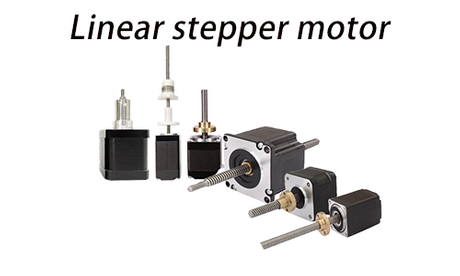
Ang tatak ng Holry 'ng hybrid stepper motor linear actuators ay dumating sa limang sukat, mula sa 28 mm square hanggang 86 mm square, na naaayon sa laki ng NEMA 11, laki 14, laki ng 17, laki 23, at laki 34. Ang bawat laki ay may tatlo hanggang tatlong form na mga kadahilanan na magagamit - bihag, hindi captive at isang panlabas na linear na bersyon.
Mayroong higit sa dalawampung magkakaibang mga paglalakbay bawat hakbang na magagamit, mula sa. 0001563 pulgada (.00397 mm) hanggang .003937 pulgada (1 mm). Ang Microstepping ay maaaring magamit para sa kahit na mas pinong resolusyon.
Ang isang hindi nakakaakit na lead screw linear actuator ay isang uri ng linear actuator na nagko -convert rotary motion papunta sa linear na paggalaw gamit ang isang lead screw. Ito ay tinatawag na hindi captive dahil ang lead screw ay hindi nakakabit sa shaft ng motor at maaaring malayang paikutin, na nagpapahintulot sa manu-manong pagsasaayos ng posisyon ng actuator.
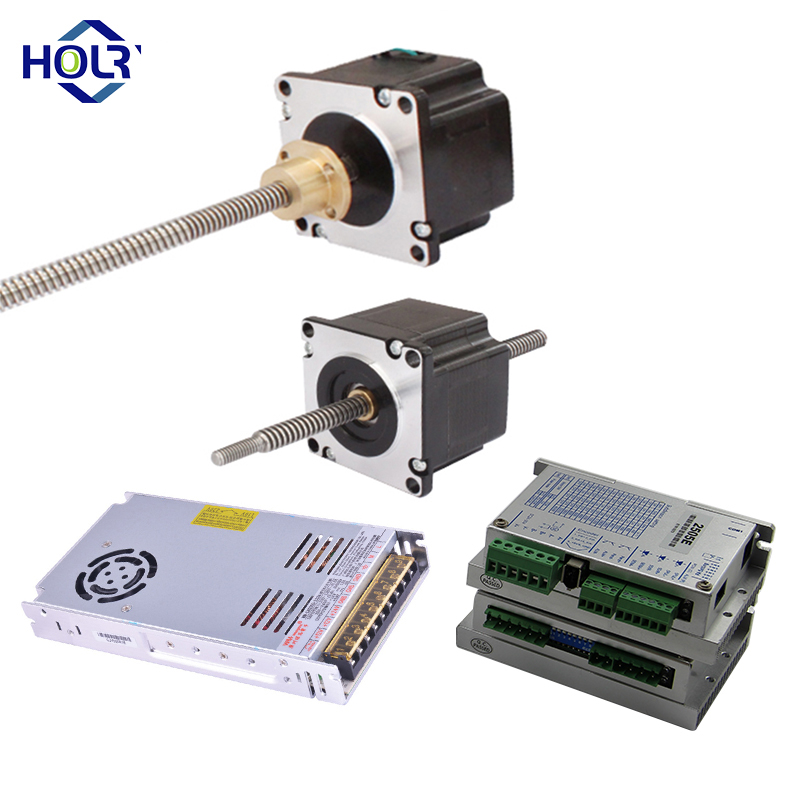
Ang NEMA 34 Non-Captive Lead Screw Linear Actuator ay isang uri ng linear actuator na idinisenyo upang mag -convert Rotational motion sa linear motion. Ang actuator ay binubuo ng isang NEMA 34 Stepper Motor , a lead screw , at isang linear slide.
Ang NEMA 34 stepper motor ay isang uri ng high-torque, low-speed motor na karaniwang ginagamit sa mga pang-industriya na aplikasyon. Ang motor ay naka -mount sa linear slide at konektado sa lead screw sa pamamagitan ng isang pagkabit.
Ang lead screw ay a Ang sinulid na baras na idinisenyo upang isalin ang rotational motion ng motor sa linear motion. Ang lead screw ay karaniwang gawa sa bakal o tanso at may sinulid na may isang high-pitch thread upang ma-maximize ang linear na paglalakbay ng actuator.
Ang linear slide ay isang gabay na riles na sumusuporta at gumagabay sa linear na paggalaw ng actuator. Ang slide ay karaniwang gawa sa aluminyo o bakal at idinisenyo upang magbigay ng makinis at tumpak linear na paggalaw.
Ang salitang 'non-captive ' ay tumutukoy sa katotohanan na ang tingga ng tornilyo ay hindi pisikal na konektado sa shaft ng motor. Nangangahulugan ito na ang actuator ay maaaring malayang gumalaw kasama ang linear slide nang hindi umiikot ang motor.
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు