उत्पाद वर्णन
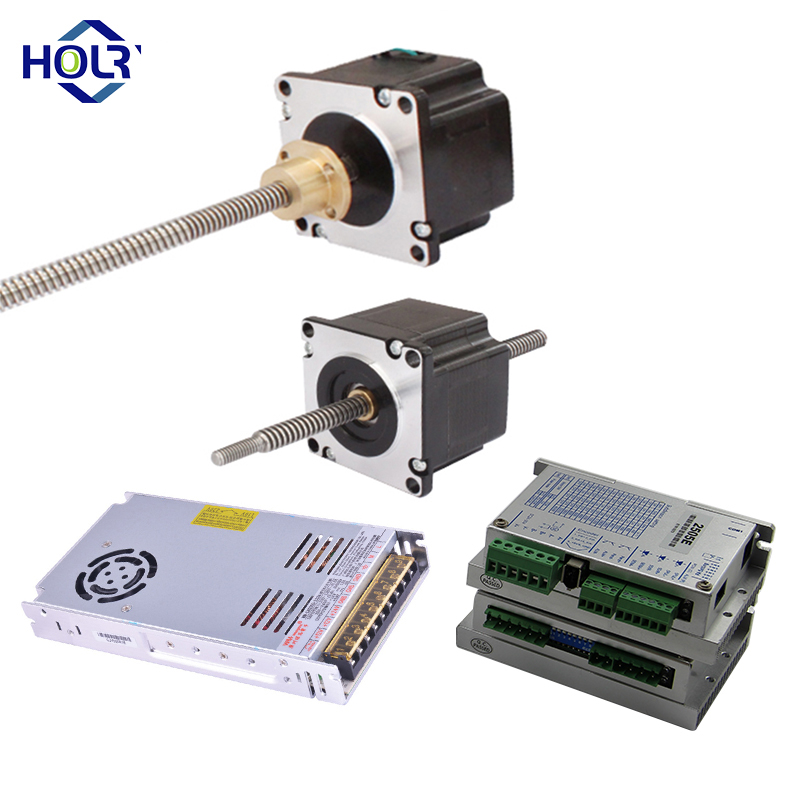
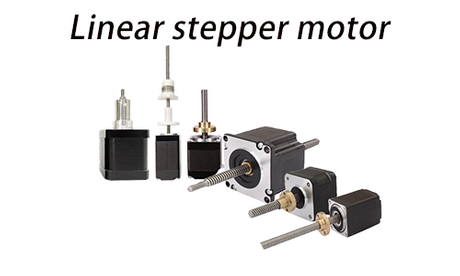
हाइब्रिड का होलरी 'ब्रांड स्टेपर मोटर रैखिक एक्ट्यूएटर्स 28 मिमी वर्ग से 86 मिमी वर्ग से लेकर 86 मिमी वर्ग से लेकर 86 मिमी वर्ग, आकार 14, आकार 17, आकार 23, और आकार 34 के समान पांच आकारों में आता है।
प्रति कदम उपलब्ध बीस से अधिक अलग -अलग यात्राएं उपलब्ध हैं। 0001563 इंच (.00397 मिमी) से .003937 इंच (1 मिमी)। माइक्रोस्टेपिंग का उपयोग महीन संकल्प के लिए भी किया जा सकता है।
एक गैर-कैप्टिव लीड स्क्रू रैखिक एक्ट्यूएटर एक प्रकार का है रैखिक एक्ट्यूएटर जो परिवर्तित करता है रोटरी गति में रैखिक गति । एक लीड स्क्रू का उपयोग करके इसे गैर-कैप्टिव कहा जाता है क्योंकि लीड स्क्रू मोटर शाफ्ट से जुड़ा नहीं है और एक्ट्यूएटर की स्थिति के मैनुअल समायोजन के लिए अनुमति देता है, जो स्वतंत्र रूप से घूम सकता है।
NEMA 34 नॉन-कैप्टिव लीड स्क्रू रैखिक एक्ट्यूएटर एक प्रकार का है रैखिक एक्ट्यूएटर जिसे परिवर्तित करने के लिए डिज़ाइन किया गया है घूर्णी गति । रैखिक गति में एक्ट्यूएटर में एक NEMA 34 होता है स्टेपर मोटर , ए लीड स्क्रू , और एक रैखिक स्लाइड।
NEMA 34 स्टेपर मोटर एक प्रकार का उच्च-टॉर्क, कम गति वाली मोटर है जो आमतौर पर औद्योगिक अनुप्रयोगों में उपयोग किया जाता है। मोटर को घुड़सवार किया जाता है रैखिक स्लाइड और एक युग्मन के माध्यम से लीड स्क्रू से जुड़ा हुआ है।
लीड स्क्रू एक है थ्रेडेड रॉड जो मोटर की घूर्णी गति को रैखिक गति में अनुवाद करने के लिए डिज़ाइन किया गया है। लीड स्क्रू आमतौर पर स्टील या पीतल से बना होता है और इसे अधिकतम करने के लिए एक उच्च-पिच थ्रेड के साथ पिरोया जाता है रैखिक यात्रा । एक्ट्यूएटर की
रैखिक स्लाइड एक गाइड रेल है जो एक्ट्यूएटर की रैखिक गति का समर्थन और मार्गदर्शन करती है। स्लाइड आमतौर पर एल्यूमीनियम या स्टील से बना होता है और इसे सुचारू और सटीक प्रदान करने के लिए डिज़ाइन किया गया है रैखिक गति.
शब्द 'नॉन-कैप्टिव ' इस तथ्य को संदर्भित करता है कि लीड स्क्रू शारीरिक रूप से मोटर शाफ्ट से जुड़ा नहीं है। इसका मतलब है कि एक्ट्यूएटर मोटर को घुमाए बिना रैखिक स्लाइड के साथ स्वतंत्र रूप से आगे बढ़ सकता है।
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు