 |














86HSG76
MERHABA
| Miktar: | |
|---|---|
Ürün Açıklaması
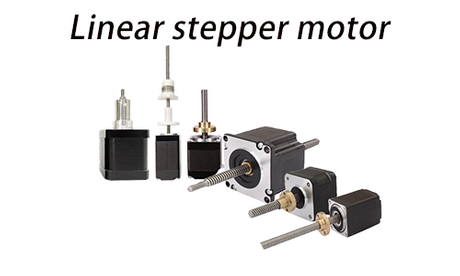
HOLRY markasının hibrit Step Motorlu Lineer Aktüatörleri, Nema boyut 11, boyut 14, boyut 17, boyut 23 ve boyut 34'e karşılık gelen 28 mm kareden 86 mm kareye kadar beş boyutta gelir. Her boyutun üç ila üç formu vardır. mevcut faktörler - sabit, sabit olmayan ve harici doğrusal versiyon.
Adım başına yirmiden fazla farklı seyahat seçeneği mevcuttur.0001563 inç (0,00397 mm) ile 0,003937 inç (1 mm) arası.Daha da iyi çözünürlük için mikro adımlama kullanılabilir.
Sabit olmayan bir kurşun vidalı doğrusal aktüatör, bir tür doğrusal aktüatör dönüştüren dönme hareketi içine doğrusal hareket . bir kurşun vida kullanarak Sabit olmayan olarak adlandırılmasının nedeni, kurşun vidanın motor miline bağlı olmaması ve serbestçe dönebilmesi ve aktüatörün konumunun manuel olarak ayarlanmasına izin vermesidir.
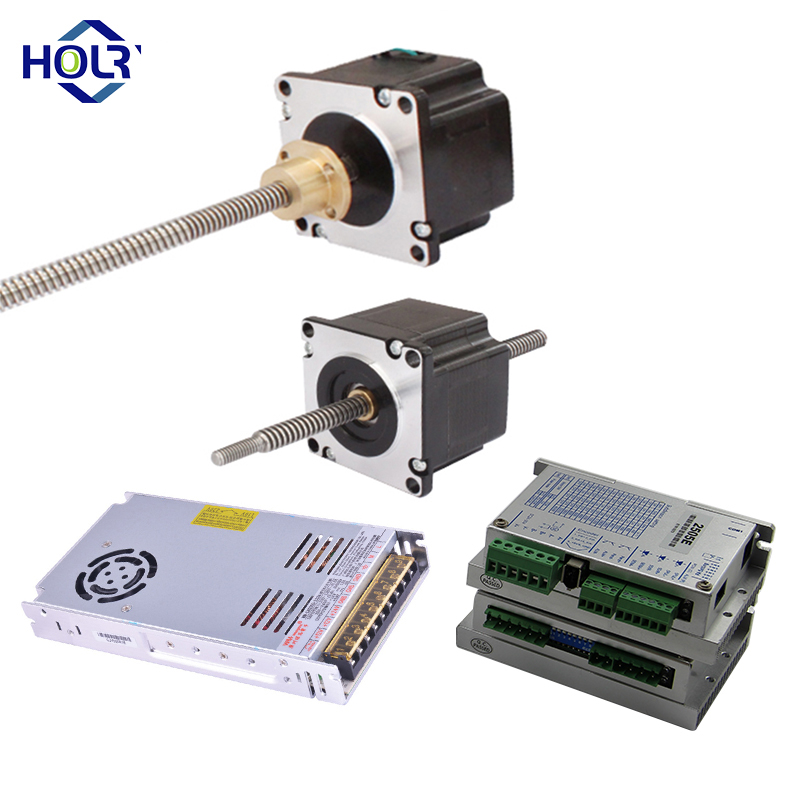
NEMA 34 sabit olmayan kurşun vidalı doğrusal aktüatör , bir tür doğrusal aktüatör dönüştürmek üzere tasarlanmış dönme hareketi doğrusal harekete dönüşür.Aktüatör bir NEMA 34'ten oluşur step motor , bir kurşun vida ve doğrusal bir slayt.
NEMA 34 step motor, endüstriyel uygulamalarda yaygın olarak kullanılan, yüksek torklu, düşük hızlı bir motor türüdür.Motor şuraya monte edilmiştir: doğrusal kızaktır ve bir kaplin aracılığıyla kılavuz vidaya bağlanır.
Kurşun vida bir dişli çubuk . Motorun dönme hareketini doğrusal harekete dönüştürmek için tasarlanmış Kılavuz vida tipik olarak çelik veya pirinçten yapılır ve maksimum verimi sağlamak için yüksek hatveli bir dişle dişlidir. doğrusal hareketi . aktüatörün
Doğrusal kızak, aktüatörün doğrusal hareketini destekleyen ve yönlendiren bir kılavuz raydır.Kızak tipik olarak alüminyum veya çelikten yapılır ve pürüzsüz ve hassas bir şekilde sağlamak üzere tasarlanmıştır. doğrusal hareket.
'Sabit olmayan' terimi, kılavuz vidanın motor miline fiziksel olarak bağlı olmadığı anlamına gelir.Bu, aktüatörün, motoru döndürmeden doğrusal kızak boyunca serbestçe hareket edebileceği anlamına gelir.
Özellikler
Bir uygulamaya entegre edilmesi çok daha kolaydır;programlanabilir kontrolörler/sürücüler ile birleştirilebilir.
Hareket kontrolünde daha yüksek düzeyde hassasiyet sağlayın (hız, tork ve kuvvet, hareket sırasında farklı aşamalarda değiştirilebilir).
Aktüatörler sızıntılara veya kirlenmeye karşı hassas değildir; daha güvenli, daha temiz ve daha kullanışlıdır.
Uzun vadede daha ekonomiktir, daha az bakım gerektirir, sağlamdır ve kullanımı/kurulumu kolaydır, daha uzun ömürlüdür ve farklı çevre koşullarında güvenle kullanılabilir.
Basit hızlı bağlantı kabloları ve kablolarıyla aktüatörler kolayca monte edilebilir, daha kompakttır ve sessiz çalışır.
Yapılandırmalar
Tüm özellikler için lütfen step motor kataloğumuzu inceleyin.
Harici doğrusal, sabit olmayan ve sabit motor arasındaki temel farklar şunlardır:
Harici | Esir olmayan | Esir |
 |  |  |
| Harici lineer motorda rotora vida takılmıştır, bu nedenle DC motor gibi motor gövdesinin dışında döner. | Sabit olmayan vida, motor gövdesinin içinde ve dışında serbestçe hareket eder ve dönmez. | Tutucunun çoğunlukla motor gövdesinin içinde tutulan ve bir oluğa bağlı kısa bir vidası vardır. |
| Harici lineer motorlar, somunun tahrikli bir taşıyıcı düzeneği ile değiştirildiği motorlu raylara en çok benzer. Esir olmayanlar genellikle en kısa toplam uzunluktaki düzenektir, sabit olan ise en uzun olanıdır. | ||
Nema 24 Sabit Olmayan Vidalı Lineer Aktüatör Parametreleri | |||
| Vida Çapı (mm) | Vida Kurşun (mm) | Başlangıçlar | Adım Uzunluğu(1,8°) |
| 15.875 | 2.5400 | 1 | 0.0127 |
| 15.875 | 3.1750 | 1 | 0.0159 |
| 15.875 | 5.0800 | 2 | 0.0254 |
| 15.875 | 6.3500 | 2 | 0.0318 |
| 15.875 | 12.7000 | 4 | 0.0635 |
| 15.875 | 25.4000 | 4 | 0.1270 |
Son Makine Seçenekleri | Vida Somunu Seçenekleri |
 |  |
| Özel çözümler için lütfen HOLRY ile iletişime geçin. | |

Başvurular

SSS
Step motor, dijital darbeleri mekanik şaft dönüşüne dönüştüren elektromanyetik bir cihazdır.Adım motorlarının avantajları düşük maliyet, yüksek güvenilirlik, düşük hızlarda yüksek tork ve hemen hemen her ortamda çalışabilen basit, sağlam yapıdır.

Adım motorları, her elektrik darbesinin motoru bir adım döndürmesinden dolayı bu şekilde adlandırılmıştır.Adım motorları, darbeleri motora göndererek dönmesini sağlayan bir sürücü tarafından kontrol edilir.
Adım açısı olarak tanımlanır , her komut darbesi için adım motor şaftının döndüğü açı .
Durdurulduğunda ancak enerji verildiğinde bir adım motoruna harici kuvvet uygulanırsa, rotor ile stator arasında üretilen çekici kuvvet, motorun durma konumunu korumak için çalışır .Dış kuvvete dayanma torkuna tutma torku denir.