 |














86HSG76
HOLRY
| Kuantitas: | |
|---|---|
Deskripsi Produk
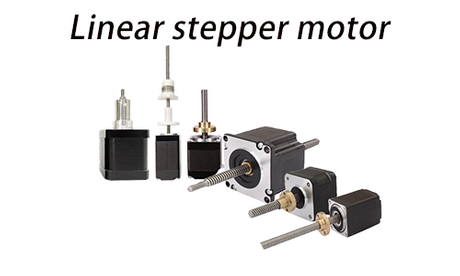
hybrid merek HOLRY Aktuator Linier Motor Stepper hadir dalam lima ukuran, dari 28 mm persegi hingga 86 mm persegi, sesuai dengan Nema ukuran 11, ukuran 14, ukuran 17, ukuran 23, dan ukuran 34. Setiap ukuran memiliki tiga hingga tiga bentuk faktor yang tersedia - versi tawanan, non-penawanan dan linier eksternal.
Ada lebih dari dua puluh perjalanan berbeda per langkah yang tersedia, mulai dari.0001563 inci (0,00397 mm) hingga 0,003937 inci (1 mm).Microstepping dapat digunakan untuk resolusi yang lebih halus.
Aktuator linier sekrup timah non-captive adalah sejenis aktuator linier yang mengkonversi gerakan berputar ke dalam gerakan linier menggunakan sekrup timah.Disebut non-captive karena lead screw tidak terpasang pada poros motor dan dapat berputar bebas sehingga memungkinkan dilakukannya penyesuaian posisi aktuator secara manual.
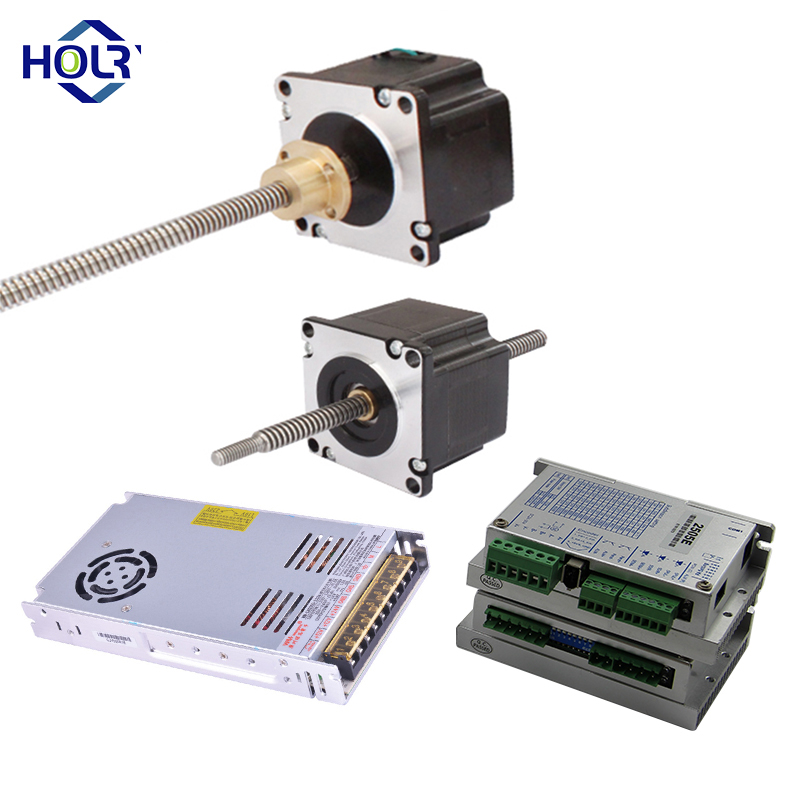
Aktuator linier sekrup timah non-captive NEMA 34 adalah sejenis aktuator linier yang dirancang untuk mengkonversi gerak rotasi menjadi gerak linier.Aktuator terdiri dari NEMA 34 motor stepper , a sekrup utama , dan slide linier.
Motor stepper NEMA 34 merupakan jenis motor torsi tinggi berkecepatan rendah yang biasa digunakan dalam aplikasi industri.Motor dipasang ke slide linier dan dihubungkan ke sekrup utama melalui kopling.
Sekrup utama adalah a batang berulir yang dirancang untuk menerjemahkan gerak putar motor menjadi gerak linier.Sekrup utama biasanya terbuat dari baja atau kuningan dan diulir dengan ulir nada tinggi untuk memaksimalkan perjalanan linier aktuator.
Slide linier adalah rel pemandu yang menopang dan memandu gerak linier aktuator.Slide biasanya terbuat dari aluminium atau baja dan dirancang untuk memberikan kelancaran dan presisi gerak linier.
Istilah 'non-captive' mengacu pada fakta bahwa sekrup utama tidak terhubung secara fisik ke poros motor.Artinya aktuator dapat bergerak bebas sepanjang slide linier tanpa memutar motor.
Fitur
Jauh lebih mudah untuk diintegrasikan ke dalam suatu aplikasi;dapat digabungkan dengan pengontrol/driver yang dapat diprogram.
Memberikan tingkat presisi yang lebih tinggi dalam kontrol gerakan (kecepatan, torsi, dan gaya dapat dimodifikasi pada berbagai tahapan selama gerakan).
Aktuator tidak rentan terhadap kebocoran atau kontaminasi - lebih aman, lebih bersih, dan nyaman.
Lebih ekonomis dalam jangka panjang, memerlukan lebih sedikit perawatan, kokoh dan mudah dioperasikan/dipasang, bertahan lebih lama dan dapat diandalkan digunakan dalam berbagai kondisi lingkungan.
Dengan kabel dan kabel sambungan cepat yang sederhana, aktuator dapat dengan mudah dirakit, lebih kompak, dan beroperasi dengan tenang.
Konfigurasi
Silakan periksa katalog motor stepper kami untuk spesifikasi lengkap.
 Katalog Motor Holry Stepper.pdf
Katalog Motor Holry Stepper.pdf
Perbedaan utama antara motor linier eksternal, non-captive, dan captive adalah,
Luar | Non-tawanan | Tawanan |
 |  |  |
| Motor linier eksternal memiliki sekrup yang ditempelkan pada rotor, sehingga berputar di luar badan motor, seperti motor DC. | Sekrup non penahan bergerak bebas masuk dan keluar dari bodi motor dan tidak berputar. | Tawanannya memiliki sekrup pendek yang sebagian besar dipasang di dalam bodi motor, dipasangkan ke spline. |
| Motor linier eksternal paling mirip dengan rel bermotor yang murnya diganti dengan rakitan kereta yang digerakkan. Non captive umumnya merupakan rakitan dengan panjang keseluruhan terpendek, sedangkan captive adalah yang terpanjang. | ||
Parameter Aktuator Linier Sekrup Timbal Tidak Tetap Nema 24 | |||
| Diameter Sekrup (mm) | Sekrup Timbal (mm) | Dimulai | Panjang Langkah (1,8°) |
| 15.875 | 2.5400 | 1 | 0.0127 |
| 15.875 | 3.1750 | 1 | 0.0159 |
| 15.875 | 5.0800 | 2 | 0.0254 |
| 15.875 | 6.3500 | 2 | 0.0318 |
| 15.875 | 12.7000 | 4 | 0.0635 |
| 15.875 | 25.4000 | 4 | 0.1270 |
Opsi Mesin Akhir | Opsi Mur Sekrup |
 |  |
| Silakan hubungi HOLRY untuk solusi khusus. | |

Aplikasi

Pertanyaan Umum
Motor stepper adalah perangkat elektromagnetik yang mengubah pulsa digital menjadi putaran poros mekanis.Keuntungan motor langkah adalah biaya rendah, keandalan tinggi, torsi tinggi pada kecepatan rendah, dan konstruksi sederhana dan kokoh yang dapat dioperasikan di hampir semua lingkungan.

Motor stepper dinamakan demikian karena setiap pulsa listrik memutar motor satu langkah.Motor stepper dikendalikan oleh driver, yang mengirimkan pulsa ke motor sehingga menyebabkannya berputar.
Sudut langkah didefinisikan sebagai sudut putaran poros motor stepper untuk setiap pulsa perintah.
Jika gaya luar diterapkan pada motor penggerak ketika berhenti tetapi diberi energi, gaya tarik menarik yang dihasilkan antara rotor dan stator bekerja untuk mempertahankan posisi berhenti motor .Torsi menahan gaya luar ini disebut torsi penahan.