Product Description
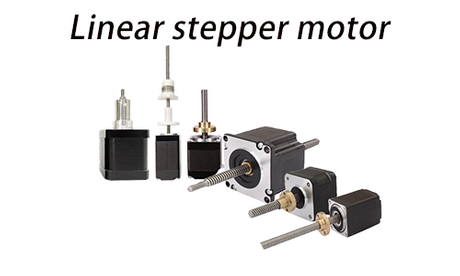
The HOLRY' brand of hybrid Stepper Motor Linear Actuators come in five sizes, from 28 mm square to 86 mm square, corresponding to Nema size 11, size 14, size 17, size 23, and size 34. Each size has three to three form factors available - captive, non-captive and an external linear version.
There are over twenty different travels per step available, from. 0001563 inch (.00397 mm) to .003937 inch (1 mm). Microstepping can be used for even finer resolution.
A non-captive lead screw linear actuator is a type of linear actuator that converts rotary motion into linear motion using a lead screw. It is called non-captive because the lead screw is not attached to the motor shaft and can rotate freely, allowing for manual adjustment of the position of the actuator.
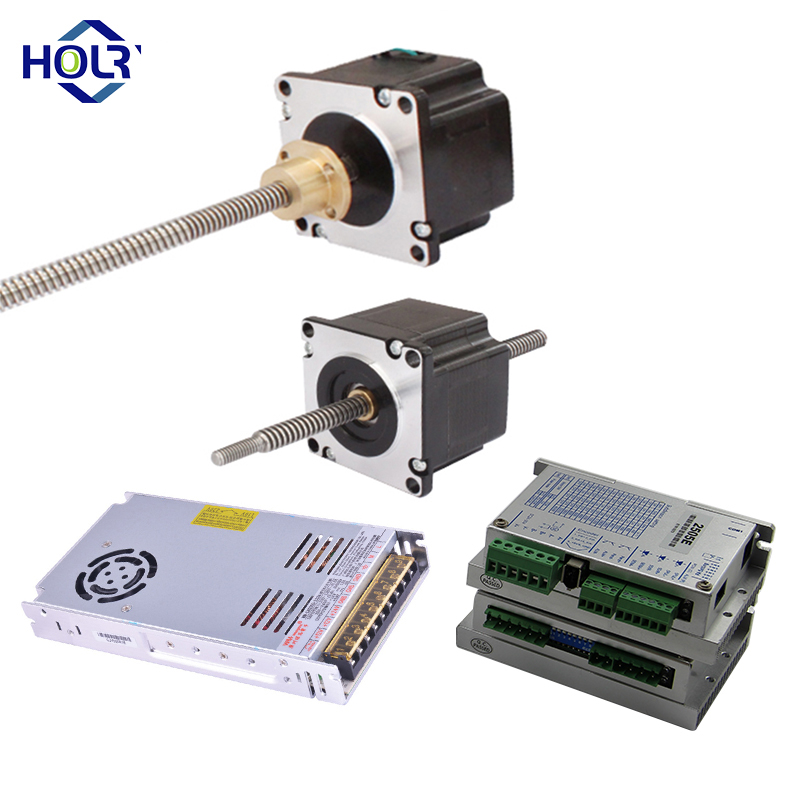
NEMA 34 non-captive lead screw linear actuator is a type of linear actuator that is designed to convert rotational motion into linear motion. The actuator consists of a NEMA 34 stepper motor, a lead screw, and a linear slide.
The NEMA 34 stepper motor is a type of high-torque, low-speed motor that is commonly used in industrial applications. The motor is mounted to the linear slide and is connected to the lead screw through a coupling.
The lead screw is a threaded rod that is designed to translate the rotational motion of the motor into linear motion. The lead screw is typically made of steel or brass and is threaded with a high-pitch thread to maximize the linear travel of the actuator.
The linear slide is a guide rail that supports and guides the linear motion of the actuator. The slide is typically made of aluminum or steel and is designed to provide smooth and precise linear motion.
The term "non-captive" refers to the fact that the lead screw is not physically connected to the motor shaft. This means that the actuator can move freely along the linear slide without rotating the motor.
 Русский
Русский English
English العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు