آ در اینجا نحوه عملکرد یک استپر موتور توضیح داده شده است :
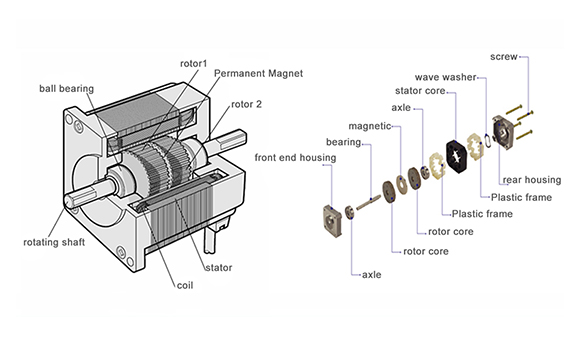
ساخت و ساز:
یک موتور پله ای معمولی شامل یک روتور و یک استاتور است.روتور قسمت دوار است، در حالی که استاتور قسمت ثابت است.روتور معمولاً مجهز به دندانه یا ساختار مغناطیسی است که با میدان های مغناطیسی تولید شده توسط استاتور در تعامل است.
استاتور و سیم پیچ ها:
استاتور حاوی سیم پیچ هایی است که در اطراف قطب ها پیچیده شده اند.این سیم پیچ ها به طور متوالی برای ایجاد یک میدان مغناطیسی دوار انرژی می گیرند.تعداد قطب ها و سیم پیچ ها در موتور، زاویه گام آن را تعیین می کند، که زاویه چرخش موتور برای هر پالس ورودی است.
تعامل مغناطیسی:
هنگامی که جریان الکتریکی به یک سیم پیچ در استاتور اعمال می شود، یک میدان مغناطیسی ایجاد می کند.روتور که معمولاً از یک آهنربای دائمی یا ماده فرومغناطیسی ساخته شده است، خود را با میدان مغناطیسی ایجاد شده توسط سیم پیچ استاتور پرانرژی همسو می کند.این باعث می شود روتور به یک موقعیت خاص حرکت کند.
چرخش مرحله ای:
موتورهای پله ای در مراحل مجزا حرکت می کنند و زاویه چرخش برای هر مرحله با طراحی موتور تعیین می شود.توالی انرژی دادن به سیم پیچ های استاتور جهت و فاصله هر مرحله را دیکته می کند.با کنترل توالی این پالس ها، کنترل دقیقی بر روی موقعیت و سرعت موتور حاصل می شود.
سیگنال های کنترلی:
برای راه اندازی یک موتور پله ای، یک کنترل کننده یا میکروکنترلر یک سری پالس های الکتریکی را به سیم پیچ های استاتور موتور می فرستد.ترتیب و زمان این پالس ها جهت و سرعت موتور را تعیین می کند.این روش کنترل امکان موقعیت یابی دقیق را بدون نیاز به سنسورهای خارجی فراهم می کند.
Full-Step و Microstepping:
موتورهای پله ای می توانند در حالت تمام گام کار کنند، که در آن هر پالس مربوط به یک مرحله است.روش دیگر، microstepping هر مرحله را به افزایش های کوچکتر تقسیم می کند و حرکت نرم تر و وضوح ریزتر را ارائه می دهد.Microstepping با کنترل دقیق تر جریان در سیم پیچ های موتور به دست می آید.