-
Q How do I troubleshoot common issues with stepper motors?
A Check for loose connections, verify power supply compatibility, ensure proper wiring and polarity, and inspect for mechanical obstructions. If problems persist, review the controller settings, and consider testing with a different driver or controller to isolate the issue.
-
Q What are common applications of stepper motors?
A Stepper motors find applications in various fields, including robotics, 3D printing, CNC machines, medical devices, and automation systems. Their ability to provide precise control makes them suitable for tasks requiring accurate positioning.
-
Q How can I control a stepper motor?
A Stepper motors can be controlled using dedicated stepper motor controllers, microcontrollers, or specialized stepper motor driver ICs. Popular control methods include full-step, half-step, and microstepping, each influencing motor performance and resolution.
-
Q What is the difference between bipolar and unipolar stepper motors?
A The main difference lies in the winding configuration. Bipolar motors have two coils per phase, and current flows in both directions, while unipolar motors have a center-tapped winding, and current flows in one direction. Bipolar motors generally offer higher torque.
-
Q Can I run a stepper motor without a dedicated driver?
A While it is possible to run a stepper motor directly from a microcontroller, using a dedicated stepper motor driver is recommended for better performance and protection against overcurrent and overheating. Stepper motor drivers provide the necessary current control and waveform shaping for optimal motor operation.
-
Q What is the difference between bipolar and unipolar stepper motors?
A The main difference lies in the winding configuration. Bipolar motors have two coils per phase, while unipolar motors have a center-tapped winding. Bipolar motors generally provide higher torque, but unipolar motors are easier to control.
-
Q How do I troubleshoot common issues with stepper motors?
A Check for loose connections, verify power supply compatibility, inspect wiring for correct polarity, and ensure there are no mechanical obstructions. Reviewing controller settings and testing with an alternate controller or driver can help identify and resolve issues.
-
Q Do stepper motors require feedback for position control?
A While stepper motors can operate in an open-loop system without feedback, closed-loop systems with feedback devices like encoders or sensors are used in applications where precise position control and error correction are essential.
-
Q What is microstepping, and how does it improve stepper motor performance?
A Microstepping is a technique that divides each full step of a stepper motor into smaller sub-steps. This allows for smoother motion, reduced vibration, and improved positioning accuracy, especially at low speeds.
-
Q What is the significance of step angle in stepper motors?
A Step angle is the angle through which the motor rotates for each input pulse. It is a critical parameter that determines the motor's resolution and accuracy. Smaller step angles result in finer control but may require more complex drive electronics.
-
Q What are the key components of a stepper motor system?
A A stepper motor system consists of the stepper motor itself, a driver to control the motor, and a controller or microcontroller that generates the sequence of pulses to drive the motor.
-
Q What is a stepper motor, and how does it differ from other types of motors?
A A stepper motor is an electromechanical device that converts electrical pulses into precise mechanical movements. Unlike other motors, it moves in discrete steps, allowing for accurate control of position and speed.
-
Q Can stepper motors operate in an open-loop configuration?
A Yes, stepper motors can operate in an open-loop system, where position control is achieved without external feedback devices. However, for critical applications, closed-loop systems with feedback may be preferred to enhance accuracy and correct errors.
-
Q What is microstepping, and why is it important?
A Microstepping is a technique that divides each full step of a stepper motor into smaller increments. This provides smoother motion, reduces vibration, and improves accuracy. Microstepping is essential for applications demanding precision.
-
Q How is the step resolution of a stepper motor determined?
A Step resolution is the smallest angle the motor can move in response to a single input pulse. It is determined by the motor's construction, the number of poles, and the drive electronics. Higher pole counts and microstepping can enhance resolution.
To calculate the step resolution, you can use the following formula:
-
Q What are the advantages of using stepper motors?
A Stepper motors offer precise control of movement, high torque at low speeds, simplicity of control, and open-loop operation (no feedback required). They are ideal for applications requiring accurate position control.
-
Q What is a stepper motor, and how does it work?
A Here's a breakdown of how a stepper motor works:
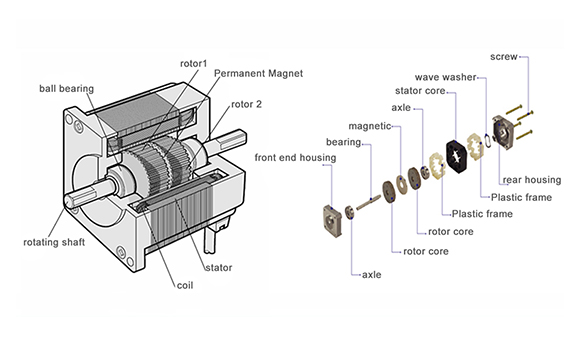
Construction:
A typical stepper motor comprises a rotor and a stator. The rotor is the rotating part, while the stator is the stationary part. The rotor is usually equipped with teeth or a magnetic structure that interacts with the magnetic fields generated by the stator.
Stator and Windings:
The stator contains coils of wire wound around poles. These coils are energized sequentially to create a rotating magnetic field. The number of poles and windings in the motor determines its step angle, which is the angle through which the motor rotates for each input pulse.
Magnetic Interaction:
When an electric current is applied to a coil in the stator, it generates a magnetic field. The rotor, which is typically made of a permanent magnet or ferromagnetic material, aligns itself with the magnetic field created by the energized stator coil. This causes the rotor to move to a specific position.
Step Rotation:
Stepper motors move in discrete steps, and the angle of rotation for each step is determined by the motor's design. The sequence of energizing the stator coils dictates the direction and distance of each step. By controlling the sequence of these pulses, precise control over the motor's position and speed is achieved.
Control Signals:
To operate a stepper motor, a controller or microcontroller sends a series of electrical pulses to the motor's stator windings. The order and timing of these pulses determine the direction and speed of the motor. This control method allows for accurate positioning without the need for external sensors.
Full-Step and Microstepping:
Stepper motors can operate in full-step mode, where each pulse corresponds to a single step. Alternatively, microstepping subdivides each step into smaller increments, providing smoother motion and finer resolution. Microstepping is achieved by controlling the current in the motor's coils more precisely.
-
Q What is the main reason to use a stepper motor?
A Essentially, stepper motors provide excellent speed control, precise positioning, and repeatability of motion. Also, stepper motors are very reliable because there are no contact brushes in the motor. This minimizes mechanical failure and maximizes the life of the motor. Moreover, stepper motors are more affordable than other motors and have a wide range of applications.
-
Q Why are stepper motors important?
A Stepper motors can produce full, instantaneous torque - even from a standstill. This makes them very useful for motion control applications, where accuracy, repeatability, and power are paramount.
-
Q What is stepper motor explanation?
A Stepper motors are DC motors that move in discrete steps. They have multiple coils that are organized in groups called "phases". By energizing each phase in sequence, the motor will rotate, one step at a time. With a computer controlled stepping you can achieve very precise positioning and/or speed control.
 Русский
Русский English
English العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు