 |















57SG
Holrie
| MOTORMAAT: | |
|---|---|
| Schroefspecificaties: | |
| Hoeveelheid: | |
Productomschrijving
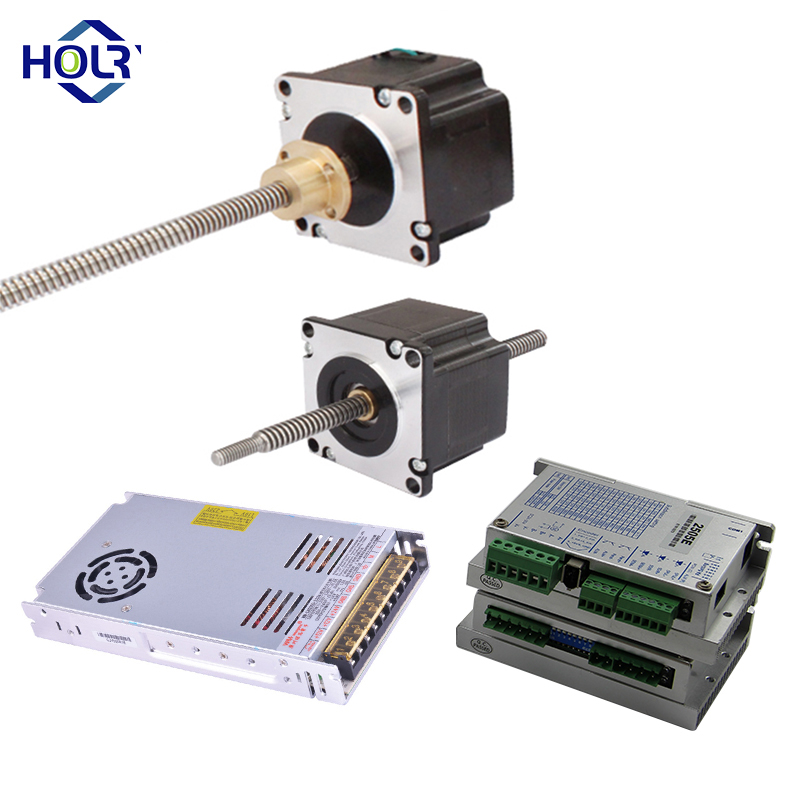
Het merk HOLRY hybride lineaire stappenmotoractuators is verkrijgbaar in vijf maten, van 28 mm in het vierkant tot 86 mm in het vierkant, wat overeenkomt met Nema maat 11, maat 14, maat 17, maat 23 en maat 34. Elke maat heeft drie tot drie vormen beschikbare factoren - captive, niet-captive en een externe lineaire versie.
Er zijn ruim twintig verschillende reizen per stap beschikbaar, vanaf.0001563 inch (0,00397 mm) tot 0,003937 inch (1 mm).Microstepping kan worden gebruikt voor een nog fijnere resolutie.
De NEMA 23 stappenmotor heeft een geïntegreerde draadstang als uitgaande as, waardoor deze verandert in een lineaire actuator die in staat is tot nauwkeurige open-luspositionering.
Functies
Veel eenvoudiger te integreren in een applicatie;kan worden gekoppeld aan programmeerbare controllers/drivers.
Zorg voor een hoger niveau van precisie bij bewegingscontrole (snelheid, koppel en kracht kunnen in verschillende fasen tijdens de beweging worden aangepast).
Actuators zijn niet gevoelig voor lekkages of vervuiling - veiliger, schoner en handiger.
Op de lange termijn zuiniger, vereisen minder onderhoud, zijn robuust en eenvoudig te bedienen/installeren, gaan langer mee en kunnen betrouwbaar worden gebruikt in verschillende omgevingsomstandigheden.
Met eenvoudige snelaansluitdraden en -kabels kunnen actuatoren eenvoudig worden gemonteerd, zijn ze compacter en werken ze stil.
Configuraties
Raadpleeg onze stappenmotorcatalogus voor de volledige specificaties.
 Holry stappenmotorcatalogus.pdf
Holry stappenmotorcatalogus.pdf
De belangrijkste verschillen tussen een externe lineaire, niet-captive en captive motor zijn:
Extern | Niet-gevangen | Gevangen |
 |  |  |
| Bij de externe lineaire motor is de schroef aan de rotor bevestigd, zodat deze buiten het motorlichaam draait, net als bij een gelijkstroommotor. | De niet-geborgde schroef beweegt vrij in en uit het motorlichaam en draait niet. | De captive heeft een korte schroef die grotendeels in het motorlichaam wordt vastgehouden, gekoppeld aan een spiebaan. |
| Externe lineaire motoren lijken het meest op gemotoriseerde rails waarbij de moer wordt vervangen door een aangedreven wagensamenstel. Niet-gevangene is over het algemeen de kortste totale lengte, terwijl de gevangene de langste is. | ||
Trapeziumvormige (ACME) draadspindelopties | ||||
| Diameter (mm) | Hoogte (mm) | Lood (mm) | Begint | Stap (mm) |
| 6 | 1 | 1 | 1 | 0.005 |
| 6 | 1.5 | 1.5 | 1 | 0.0075 |
| 6.35 | 0.794 | 0.794 | 1 | 0.00397 |
| 6.35 | 1.5875 | 3.175 | 2 | 0.015875 |
| 6.5 | 1.5 | 3 | 2 | 0.015 |
| 8 | 1 | 1 | 1 | 0.005 |
| 8 | 2 | 2 | 1 | 0.01 |
| 8 | 2 | 4 | 2 | 0.02 |
| 8 | 2 | 8 | 4 | 0.04 |
Stappenmotormodel | Stap engel (°) | Motorlengte L2 (mm) | Tarief spanning (V) | Tarief Huidig (A) | Fase Weerstand (Ω) | Fase Inductie (mH) | Vasthouden Koppel (kg.cm) | Leiding Draad (NEE.) | Rotor Luiheid (gc㎡) | Vast Koppel (g.cm) | Motor Gewicht (kg) |
57HB41F102SG | 1.8 | 41 | 6.6 | 1.2 | 5.5 | 10 | 5 | 4 | 120 | 210 | 0.45 |
57HB41F2SG | 1.8 | 41 | 2.0 | 2.0 | 1.0 | 1.7 | 5 | 4 | 120 | 210 | 0.45 |
57HB56F1SG | 1.8 | 56 | 5.92 | 1.6 | 3.7 | 12.5 | 9 | 4 | 135 | 400 | 0.7 |
57HB56F3SG | 1.8 | 56 | 3.0 | 3.0 | 1.0 | 3.0 | 9 | 4 | 135 | 400 | 0.7 |
57HB64F2SG | 1.8 | 64 | 7.0 | 2.0 | 3.6 | 12 | 12.6 | 4 | 145 | 420 | 0.72 |
57HB78F105SG | 1.8 | 78 | 6.8 | 1.5 | 4.5 | 15 | 13 | 4 | 200 | 720 | 0.95 |
57HB78F3SG | 1.8 | 78 | 2.7 | 3 | 0.9 | 3 | 15 | 4 | 200 | 720 | 0.95 |
Einde machine-opties | Opties voor schroefmoeren |
 |  |
| Neem contact op met HOLRY voor oplossingen op maat. | |

Toepassingen

FAQ
De stappenmotor is een elektromagnetisch apparaat dat digitale pulsen omzet in mechanische asrotatie.Voordelen van stappenmotoren zijn lage kosten, hoge betrouwbaarheid, hoog koppel bij lage snelheden en een eenvoudige, robuuste constructie die in vrijwel elke omgeving functioneert.

Stappenmotoren worden zo genoemd omdat elke elektriciteitspuls de motor één stap laat draaien.Stappenmotoren worden bestuurd door een driver, die de pulsen naar de motor stuurt, waardoor deze gaat draaien.
De staphoek wordt gedefinieerd als de hoek waarover de stappenmotoras draait voor elke commandopuls.
Als er externe kracht wordt uitgeoefend op een stappenmotor wanneer deze is gestopt maar bekrachtigd, werkt de aantrekkingskracht die wordt gegenereerd tussen de rotor en de stator om de stoppositie van de motor te behouden .Dit koppel om de externe kracht te weerstaan, wordt het houdkoppel genoemd.

