-
V Hoe los ik veelvoorkomende problemen met stappenmotoren op?
A Controleer op losse aansluitingen, controleer de compatibiliteit van de voeding, zorg voor de juiste bedrading en polariteit, en inspecteer op mechanische obstakels.Als de problemen aanhouden, controleer dan de instellingen van de controller en overweeg om te testen met een ander stuurprogramma of een andere controller om het probleem te isoleren.
-
V Wat zijn veelvoorkomende toepassingen van stappenmotoren?
Stappenmotoren vinden toepassingen op verschillende gebieden, waaronder robotica, 3D-printen, CNC-machines, medische apparaten en automatiseringssystemen.Hun vermogen om nauwkeurige controle te bieden, maakt ze geschikt voor taken die nauwkeurige positionering vereisen.
-
V Hoe kan ik een stappenmotor besturen?
A Stappenmotoren kunnen worden bestuurd met behulp van speciale stappenmotorcontrollers, microcontrollers of gespecialiseerde stappenmotoraansturings-IC's.Populaire besturingsmethoden zijn volledige stap, halve stap en microstepping, die elk de motorprestaties en resolutie beïnvloeden.
-
V Wat is het verschil tussen bipolaire en unipolaire stappenmotoren?
A Het belangrijkste verschil ligt in de wikkelconfiguratie.Bipolaire motoren hebben twee spoelen per fase en de stroom vloeit in beide richtingen, terwijl unipolaire motoren een in het midden afgetakte wikkeling hebben en de stroom in één richting vloeit.Bipolaire motoren bieden over het algemeen een hoger koppel.
-
V Kan ik een stappenmotor laten draaien zonder een speciale driver?
A Hoewel het mogelijk is om een stappenmotor rechtstreeks vanaf een microcontroller te laten werken, wordt het gebruik van een speciale stappenmotordriver aanbevolen voor betere prestaties en bescherming tegen overstroom en oververhitting.Stappenmotordrivers zorgen voor de noodzakelijke stroomregeling en golfvormvorming voor een optimale werking van de motor.
-
V Wat is het verschil tussen bipolaire en unipolaire stappenmotoren?
A Het belangrijkste verschil ligt in de wikkelconfiguratie.Bipolaire motoren hebben twee spoelen per fase, terwijl unipolaire motoren een in het midden afgetakte wikkeling hebben.Bipolaire motoren bieden over het algemeen een hoger koppel, maar unipolaire motoren zijn gemakkelijker te besturen.
-
V Hoe los ik veelvoorkomende problemen met stappenmotoren op?
A Controleer op losse verbindingen, controleer de compatibiliteit van de voeding, inspecteer de bedrading op de juiste polariteit en zorg ervoor dat er geen mechanische obstakels zijn.Het controleren van de controllerinstellingen en het testen met een alternatieve controller of driver kan helpen bij het identificeren en oplossen van problemen.
-
V Hebben stappenmotoren feedback nodig voor positieregeling?
A Terwijl stappenmotoren zonder feedback in een open-lussysteem kunnen werken, worden gesloten-lussystemen met feedbackapparaten zoals encoders of sensoren gebruikt in toepassingen waar nauwkeurige positiecontrole en foutcorrectie essentieel zijn.
-
V Wat is microstepping en hoe verbetert het de prestaties van de stappenmotor?
Een Microstepping is een techniek waarbij elke volledige stap van een stappenmotor wordt opgedeeld in kleinere substappen.Dit zorgt voor een soepelere beweging, minder trillingen en een verbeterde positioneringsnauwkeurigheid, vooral bij lage snelheden.
-
Vraag Wat is de betekenis van staphoek in stappenmotoren?
Een staphoek is de hoek waarover de motor draait bij elke ingangspuls.Het is een kritische parameter die de resolutie en nauwkeurigheid van de motor bepaalt.Kleinere staphoeken resulteren in een fijnere regeling, maar vereisen mogelijk complexere aandrijfelektronica.
-
V Wat zijn de belangrijkste componenten van een stappenmotorsysteem?
A Een stappenmotorsysteem bestaat uit de stappenmotor zelf, een driver om de motor te besturen, en een controller of microcontroller die de reeks pulsen genereert om de motor aan te drijven.
-
V Wat is een stappenmotor en waarin verschilt deze van andere typen motoren?
A Een stappenmotor is een elektromechanisch apparaat dat elektrische pulsen omzet in nauwkeurige mechanische bewegingen.In tegenstelling tot andere motoren beweegt hij in discrete stappen, waardoor een nauwkeurige controle van positie en snelheid mogelijk is.
-
V Kunnen stappenmotoren werken in een open-lusconfiguratie?
A Ja, stappenmotoren kunnen werken in een open-lussysteem, waarbij positiecontrole wordt bereikt zonder externe feedbackapparatuur.Voor kritische toepassingen kan echter de voorkeur worden gegeven aan gesloten-lussystemen met feedback om de nauwkeurigheid te vergroten en fouten te corrigeren.
-
Vraag Wat is microstepping en waarom is het belangrijk?
Een microstepping is een techniek die elke volledige stap van een stappenmotor in kleinere stappen verdeelt.Dit zorgt voor een soepelere beweging, vermindert trillingen en verbetert de nauwkeurigheid.Microstepping is essentieel voor toepassingen die precisie vereisen.
-
V Hoe wordt de stapresolutie van een stappenmotor bepaald?
A Stapresolutie is de kleinste hoek die de motor kan bewegen als reactie op een enkele ingangspuls.Dit wordt bepaald door de constructie van de motor, het aantal polen en de aandrijfelektronica.Hogere poolaantallen en microstepping kunnen de resolutie verbeteren.
Om de stapresolutie te berekenen, kunt u de volgende formule gebruiken:
-
V Wat zijn de voordelen van het gebruik van stappenmotoren?
A- stappenmotoren bieden nauwkeurige bewegingsregeling, hoog koppel bij lage snelheden, eenvoudige bediening en open-luswerking (geen feedback vereist).Ze zijn ideaal voor toepassingen die nauwkeurige positiecontrole vereisen.
-
V Wat is een stappenmotor en hoe werkt deze?
A Hier is een overzicht van hoe een stappenmotor werkt :
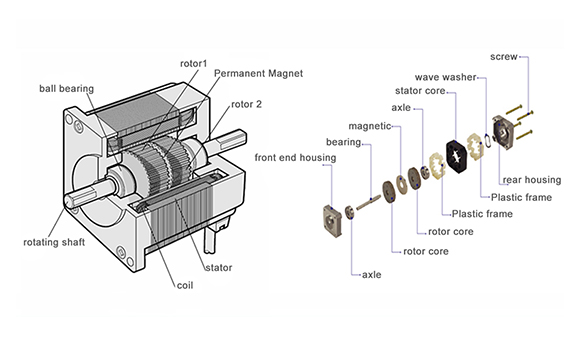
Bouw:
Een typische stappenmotor omvat een rotor en een stator.De rotor is het roterende deel, terwijl de stator het stationaire deel is.De rotor is meestal uitgerust met tanden of een magnetische structuur die interageert met de magnetische velden die door de stator worden gegenereerd.
Stator en wikkelingen:
De stator bevat draadspoelen die rond polen zijn gewikkeld.Deze spoelen worden opeenvolgend bekrachtigd om een roterend magnetisch veld te creëren.Het aantal polen en wikkelingen in de motor bepaalt de staphoek, de hoek waarover de motor draait bij elke ingangspuls.
Magnetische interactie:
Wanneer een elektrische stroom wordt toegepast op een spoel in de stator, genereert deze een magnetisch veld.De rotor, die doorgaans is gemaakt van een permanente magneet of ferromagnetisch materiaal, lijnt zichzelf uit met het magnetische veld dat wordt gecreëerd door de bekrachtigde statorspoel.Hierdoor beweegt de rotor naar een specifieke positie.
Staprotatie:
Stappenmotoren bewegen in discrete stappen en de rotatiehoek voor elke stap wordt bepaald door het ontwerp van de motor.De volgorde van het bekrachtigen van de statorspoelen bepaalt de richting en afstand van elke stap.Door de volgorde van deze pulsen te regelen, wordt nauwkeurige controle over de positie en snelheid van de motor bereikt.
Controlesignalen:
Om een stappenmotor te bedienen, stuurt een controller of microcontroller een reeks elektrische pulsen naar de statorwikkelingen van de motor.De volgorde en timing van deze pulsen bepalen de richting en snelheid van de motor.Deze besturingsmethode maakt nauwkeurige positionering mogelijk zonder dat externe sensoren nodig zijn.
Volledige stap en microstepping:
Stappenmotoren kunnen in volledige stapmodus werken, waarbij elke puls overeenkomt met een enkele stap.Als alternatief verdeelt microstepping elke stap in kleinere stappen, waardoor vloeiendere bewegingen en een fijnere resolutie worden verkregen.Microstepping wordt bereikt door de stroom in de spoelen van de motor nauwkeuriger te regelen.
-
V Wat is de belangrijkste reden om een stappenmotor te gebruiken?
A In wezen bieden stappenmotoren uitstekende snelheidsregeling, nauwkeurige positionering en herhaalbaarheid van bewegingen.Ook zijn stappenmotoren zeer betrouwbaar omdat er geen contactborstels in de motor zitten.Dit minimaliseert mechanische storingen en maximaliseert de levensduur van de motor.Bovendien zijn stappenmotoren goedkoper dan andere motoren en hebben ze een breed scala aan toepassingen.
-
V Waarom zijn stappenmotoren belangrijk?
A Stappenmotoren kunnen een volledig, onmiddellijk koppel produceren - zelfs vanuit stilstand.Dit maakt ze zeer nuttig voor motion control-toepassingen, waarbij nauwkeurigheid, herhaalbaarheid en kracht voorop staan.
-
V Wat is de uitleg van stappenmotoren?
A Stappenmotoren zijn gelijkstroommotoren die in discrete stappen bewegen.Ze hebben meerdere spoelen die zijn georganiseerd in groepen die 'fasen' worden genoemd.Door elke fase opeenvolgend te bekrachtigen, zal de motor stap voor stap draaien.Met een computergestuurde stepping kunt u een zeer nauwkeurige positionering en/of snelheidsregeling realiseren.