あ の仕組みを詳しく説明します ステッピング モーター。
工事:
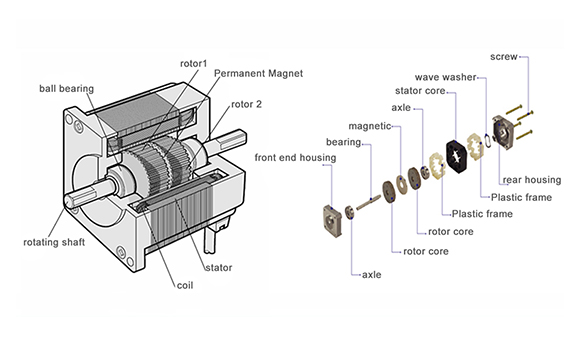
一般的なステッピング モーターは、ローターとステーターで構成されます。ローターは回転部分であり、ステーターは静止部分です。ローターには通常、ステーターが生成する磁場と相互作用する歯または磁気構造が装備されています。
固定子と巻線:
ステータには、極の周りに巻かれたワイヤのコイルが含まれています。これらのコイルは順番に通電されて回転磁場を生成します。モーターの極と巻線の数によってステップ角が決まります。ステップ角は、入力パルスごとにモーターが回転する角度です。
磁気相互作用:
ステーター内のコイルに電流が流れると、磁界が発生します。ロータは通常、永久磁石または強磁性材料で作られており、通電されたステータ コイルによって生成される磁界と整列します。これにより、ローターが特定の位置に移動します。
ステップ回転:
ステッピング モーターは個別のステップで動作し、各ステップの回転角度はモーターの設計によって決まります。ステーター コイルに通電する順序によって、各ステップの方向と距離が決まります。これらのパルスのシーケンスを制御することにより、モーターの位置と速度の正確な制御が実現されます。
制御信号:
ステッピング モーターを動作させるには、コントローラーまたはマイクロコントローラーが一連の電気パルスをモーターの固定子巻線に送信します。これらのパルスの順序とタイミングによって、モーターの方向と速度が決まります。この制御方法により、外部センサーを必要とせずに正確な位置決めが可能になります。
フルステップとマイクロステップ:
ステッピング モーターは、各パルスが 1 つのステップに対応するフルステップ モードで動作できます。あるいは、マイクロステッピングは各ステップをより小さな増分に細分化し、よりスムーズな動きとより細かい解像度を提供します。マイクロステッピングは、モーターのコイルの電流をより正確に制御することによって実現されます。