 |















20SGG
Holry
| TAILLE DU MOTEUR : | |
|---|---|
| Spécifications des vis : | |
| Quantité: | |
Description du produit
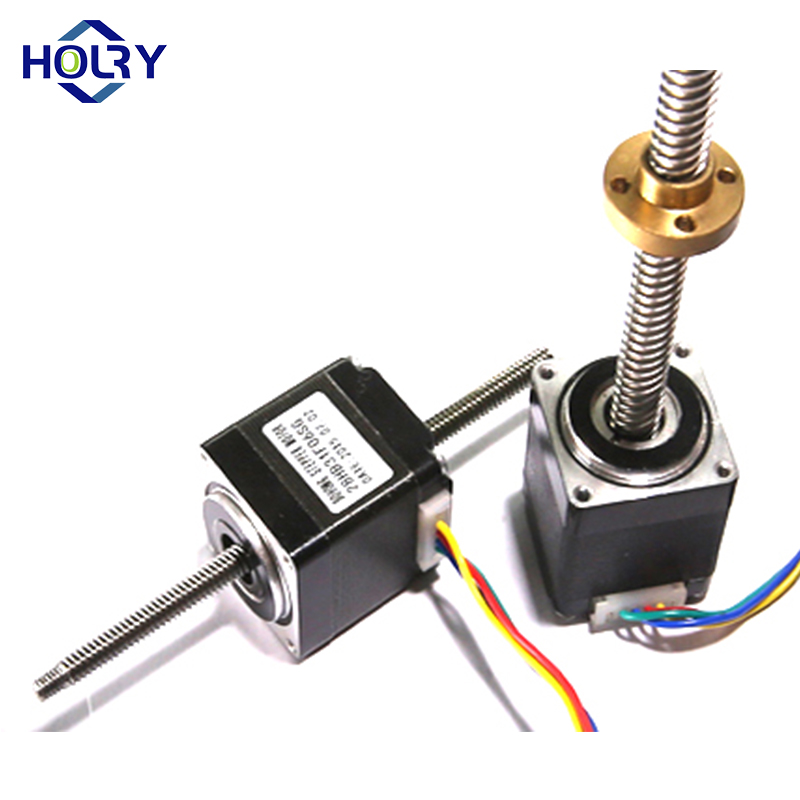
La marque HOLRY d' actionneurs linéaires à moteur pas à pas hybrides est disponible en cinq tailles, du carré de 20 mm au carré de 86 mm, correspondant à la taille Nema 8, taille 11, taille 14, taille 17, taille 23 et taille 34. Chaque taille a trois à trois facteurs de forme disponibles : captif, non captif et une version linéaire externe.
Il existe plus de vingt voyages différents par étape disponibles, à partir de.0001563 pouces (0,00397 mm) à 0,003937 pouces (1 mm).Le micropas peut être utilisé pour une résolution encore plus fine.
Le moteur pas à pas NEMA 8 est doté d'une tige filetée Tr6 comme arbre de sortie, le transformant en un actionneur linéaire capable d'un positionnement précis en boucle ouverte.
Caractéristiques
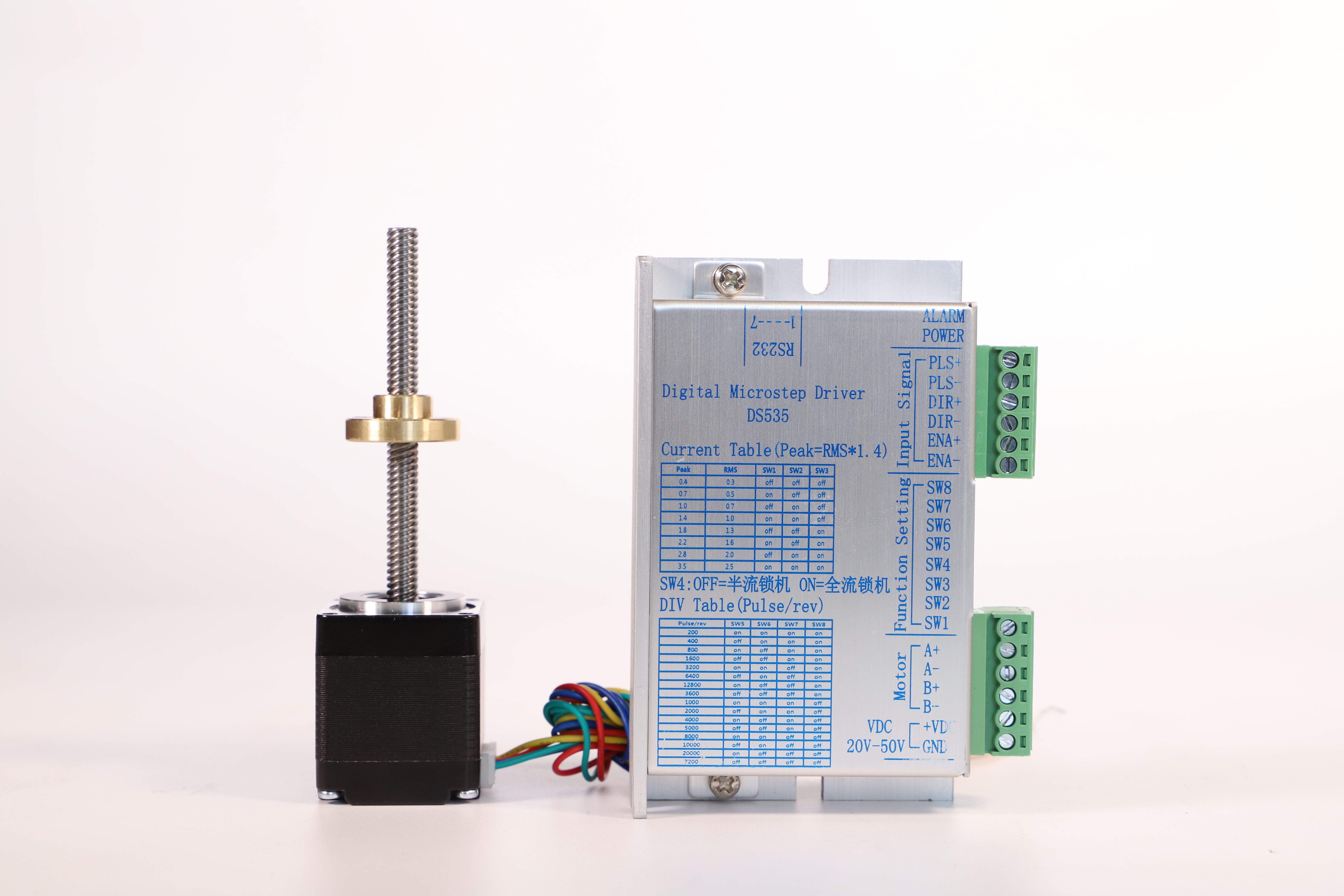
Beaucoup plus facile à intégrer dans une application ;peut être couplé à des contrôleurs/pilotes programmables.
Fournit un niveau plus élevé de précision dans le contrôle du mouvement (la vitesse, le couple et la force peuvent être modifiés à différentes étapes du mouvement).
Les actionneurs ne sont pas sensibles aux fuites ou à la contamination : ils sont plus sûrs, plus propres et plus pratiques.
Plus économiques à long terme, nécessitent moins d’entretien, sont robustes et faciles à utiliser/installer, durent plus longtemps et peuvent être utilisés de manière fiable dans différentes conditions environnementales.
Avec de simples fils et câbles à connexion rapide, les actionneurs peuvent être facilement assemblés, sont plus compacts et fonctionnent silencieusement.
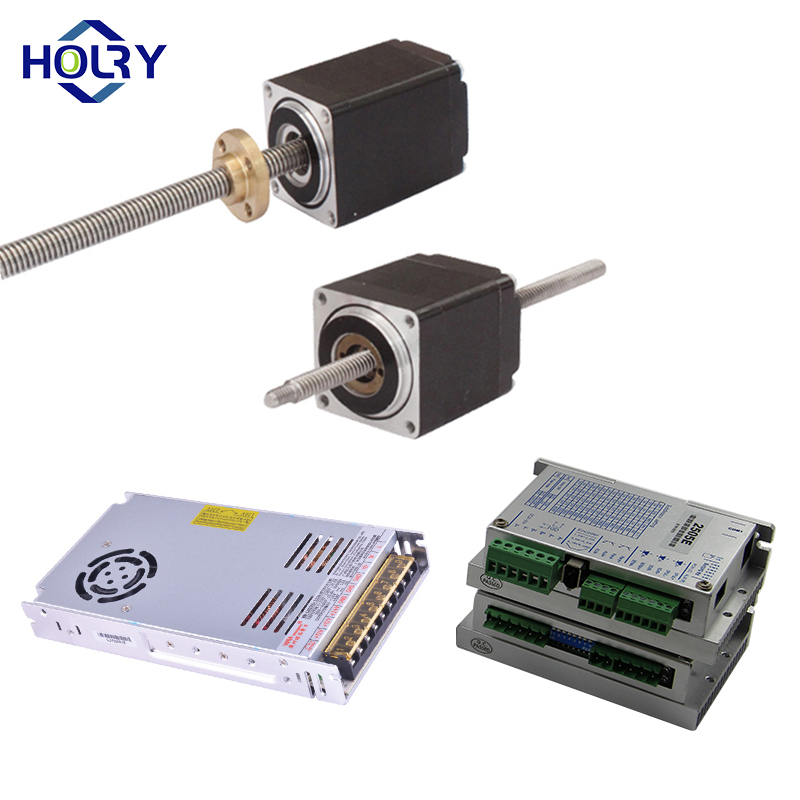
Configurations
Veuillez consulter notre catalogue de moteurs pas à pas pour les spécifications complètes.
 Catalogue des moteurs pas à pas Holry.pdf
Catalogue des moteurs pas à pas Holry.pdf
Les principales différences entre un moteur linéaire externe, non captif et captif sont les suivantes :
Externe | Non captif | Captif |
 |  |  |
| Le moteur linéaire externe a la vis fixée au rotor, de sorte qu'il tourne à l'extérieur du corps du moteur, comme un moteur à courant continu. | La vis non imperdable se déplace librement dans et hors du corps du moteur et ne tourne pas. | Le captif a une vis courte qui est maintenue principalement à l'intérieur du corps du moteur, couplée à une cannelure. |
| Les moteurs linéaires externes s'apparentent le plus aux rails motorisés où l'écrou est remplacé par un ensemble chariot entraîné. Le non captif est généralement l'ensemble de longueur totale le plus court, tandis que le captif est le plus long. | ||
Options de vis mères trapézoïdales (ACME) | ||||
| Diamètre (mm) | Pas (mm) | Plomb (mm) | Départs | Étape (mm) |
| 6 | 1 | 1 | 1 | 0.005 |
| 6 | 1.5 | 1.5 | 1 | 0.0075 |
| 6.35 | 0.794 | 0.794 | 1 | 0.00397 |
| 6.35 | 1.5875 | 3.175 | 2 | 0.015875 |
| 6.5 | 1.5 | 3 | 2 | 0.015 |
| 8 | 1 | 1 | 1 | 0.005 |
| 8 | 2 | 2 | 1 | 0.01 |
| 8 | 2 | 4 | 2 | 0.02 |
| 8 | 2 | 8 | 4 | 0.04 |
de moteur pas à pas Modèle
| Étape Angle (°) | Moteur Longueur L2(mm) | Noté Actuel (UN) | Phase Résistance (Ω) | Phase Inductance (mH) | Holding Couple (Kg.cm) | Détente Couple (g.cm) | Rotor Inertie (g.cm⊃2;) | Plomb Fil (NON.) |
28HB31F09SG | 1.8 | 31 | 0.95 | 2.8 | 0.8 | 0.8 | 15 | 9 | 4 |
28HB31F06SG | 1.8 | 31 | 0.68 | 5.6 | 3.4 | 0.6 | 15 | 9 | 4 |
28HB44F09SG | 1.8 | 44 | 0.95 | 3.4 | 1.2 | 1.2 | 35 | 12 | 4 |
28HB44F06SG | 1.8 | 44 | 0.68 | 6.8 | 4.9 | 0.95 | 35 | 11 | 4 |
28HB51F09SG | 1.8 | 51 | 0.95 | 4.6 | 1.8 | 1.5 | 50 | 18 | 4 |
28HB51F06SG | 1.8 | 51 | 0.68 | 9.2 | 7.2 | 1.2 | 50 | 18 | 4 |
Options de machine finale | Options d'écrou de vis |
 |  |
| Veuillez contacter HOLRY pour des solutions personnalisées. | |

Applications

FAQ
Le moteur pas à pas est un dispositif électromagnétique qui convertit les impulsions numériques en rotation mécanique de l'arbre.Les avantages des moteurs pas à pas sont leur faible coût, leur grande fiabilité, leur couple élevé à basse vitesse et leur construction simple et robuste qui fonctionne dans presque tous les environnements.

Les moteurs pas à pas sont ainsi nommés parce que chaque impulsion électrique fait tourner le moteur d'un pas.Les moteurs pas à pas sont contrôlés par un pilote qui envoie les impulsions dans le moteur, le faisant tourner.
L'angle de pas est défini comme l'angle selon lequel l'arbre du moteur pas à pas tourne pour chaque impulsion de commande..
Si une force externe est appliquée à un moteur pas à pas lorsqu'il est arrêté mais sous tension, la force d'attraction générée entre le rotor et le stator permet de maintenir la position d'arrêt du moteur .Ce couple de résistance à la force externe est appelé couple de maintien.

