 |














35SGG
هولی
| سر پیچ: | |
|---|---|
| تعداد: | |
توضیحات محصول
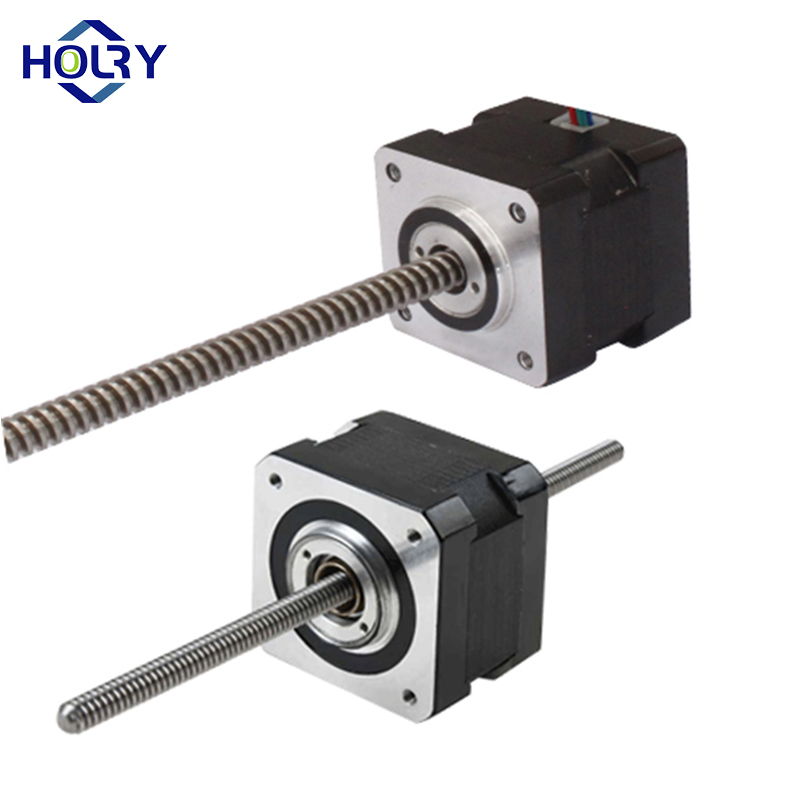
هیبریدی HOLRY محرک های خطی استپر موتور در پنج سایز، از 28 میلی متر مربع تا 86 میلی متر مربع، مطابق با سایز نما 11، سایز 14، سایز 17، سایز 23 و سایز 34 عرضه می شود. هر سایز دارای سه تا سه فرم است. عوامل موجود - اسیر، غیر اسیر و یک نسخه خطی خارجی.
بیش از بیست سفر مختلف در هر مرحله در دسترس است، از.0001563 اینچ (0.00397 میلی متر) تا 0.003937 اینچ (1 میلی متر).Microstepping را می توان برای وضوح حتی بهتر استفاده کرد.
موتور پله ای NEMA 14 دارای یک میله رزوه ای Tr6 به عنوان شفت خروجی خود است که آن را به یک محرک خطی با قابلیت موقعیت یابی حلقه باز دقیق تبدیل می کند.
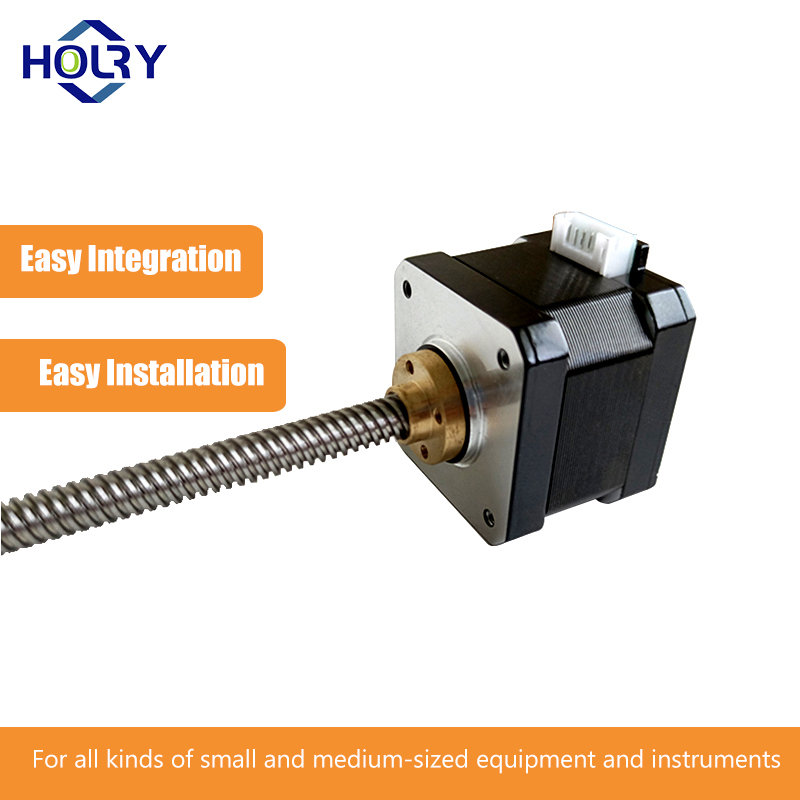
امکانات
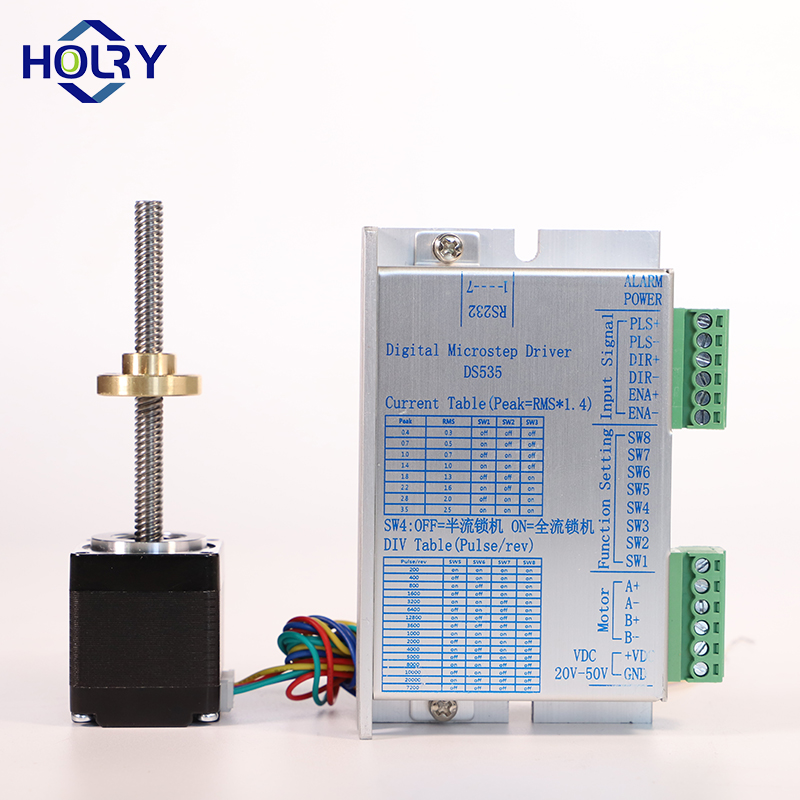
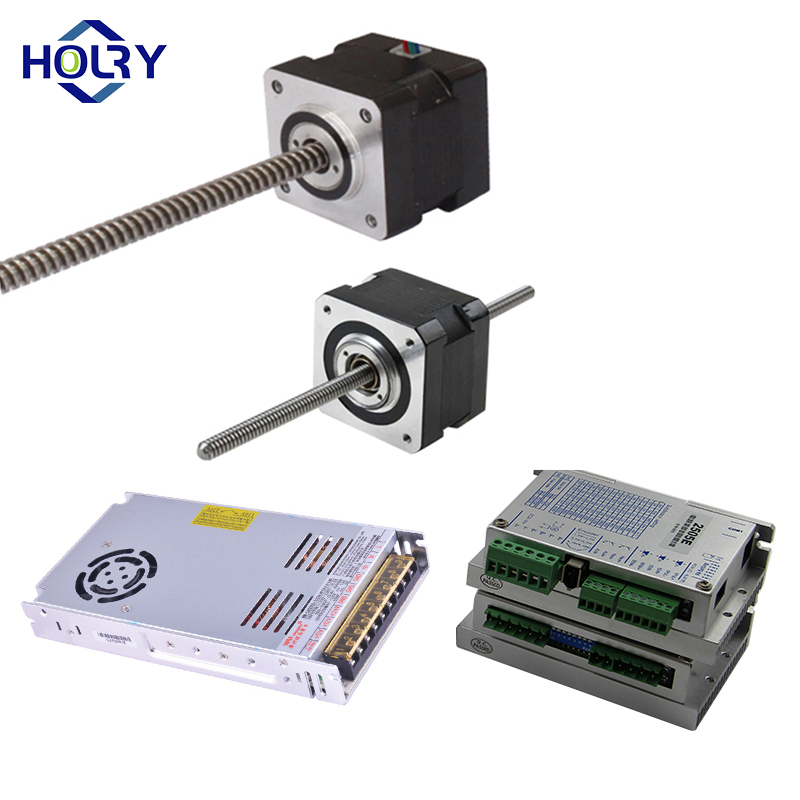
ادغام در یک برنامه بسیار ساده تر.می تواند با کنترلرها/درایورهای قابل برنامه ریزی همراه شود.
دقت بالاتری را در کنترل حرکت ارائه دهید (سرعت، گشتاور و نیرو را می توان در مراحل مختلف در طول حرکت تغییر داد).
عملگرها مستعد نشتی یا آلودگی نیستند - ایمن تر، تمیزتر و راحت تر.
در درازمدت مقرون به صرفه تر است، نیاز به تعمیر و نگهداری کمتری دارد، ناهموار و کارکرد/نصب آسان است، عمر طولانی تری دارد و می تواند به طور قابل اعتماد در شرایط محیطی مختلف استفاده شود.
با سیمها و کابلهای اتصال سریع ساده، محرکها میتوانند به راحتی مونتاژ شوند، فشردهتر هستند و بیصدا عمل میکنند.
پیکربندی
لطفا کاتالوگ موتور پله ای ما را برای مشخصات کامل بررسی کنید.
تفاوت اصلی بین یک موتور خطی، غیر محصور و محبوس خارجی این است که
خارجی | غیر اسیر | اسیر |
 |  |  |
| موتور خطی خارجی دارای پیچی است که به روتور متصل شده است، بنابراین مانند یک موتور DC از خارج به بدنه موتور می چرخد. | پیچ غیر محصور آزادانه در داخل و خارج بدنه موتور حرکت می کند و نمی چرخد. | کاپیت دارای یک پیچ کوتاه است که بیشتر در داخل بدنه موتور نگه داشته می شود و به یک اسپلین متصل می شود. |
| موتورهای خطی خارجی بیشتر شبیه به ریل های موتوری هستند که در آن مهره با یک مجموعه کالسکه رانده جایگزین می شود. Non-Captive معمولا کوتاه ترین طول کلی است، در حالی که اسیر طولانی ترین است. | ||
گزینه های پیچ سرب ذوزنقه ای (ACME). | ||||
| قطر (میلی متر) | گام (میلی متر) | سرب (میلی متر) | شروع می شود | مرحله (میلی متر) |
| 6 | 1 | 1 | 1 | 0.005 |
| 6 | 1.5 | 1.5 | 1 | 0.0075 |
| 6 | 2 | 2 | 1 | 0.01 |
| 6.35 | 0.794 | 0.794 | 1 | 0.00397 |
| 6.35 | 1.5875 | 3.175 | 2 | 0.015875 |
| 6.5 | 1.5 | 3 | 2 | 0.015 |
| 8 | 1 | 1 | 1 | 0.005 |
| 8 | 2 | 2 | 1 | 0.01 |
| 8 | 2 | 4 | 2 | 0.02 |
| 8 | 2 | 8 | 4 | 0.04 |
استپر موتور مدل
| گام زاویه (°) | موتور طول L2 (mm) | دارای رتبه جاری (آ) | فاز مقاومت (Ω) | فاز اندوکتانس (mH) | برگزاری گشتاور (Kg.cm) | بازدارنده گشتاور (g.cm) | روتور اینرسی (g.cm⊃2;) | رهبری سیم (نه.) | موتور وزن (g) |
35HB27F05SG | 1.8 | 27 | 0.5 | 20 | 17 | 1.3 | 50 | 11 | 4 | 110 |
35HB27F08SG | 1.8 | 27 | 0.8 | 5.5 | 5.8 | 1.3 | 50 | 11 | 4 | 110 |
35HB27S04SG | 1.8 | 27 | 0.4 | 30 | 10 | 1.0 | 50 | 11 | 6 | 110 |
35HB34F05SG | 1.8 | 34 | 0.5 | 25 | 25 | 1.8 | 80 | 13 | 4 | 180 |
35HB34F08SG | 1.8 | 34 | 0.8 | 6.5 | 10 | 1.8 | 80 | 13 | 4 | 180 |
35HB34S04SG | 1.8 | 34 | 0.4 | 30 | 15 | 1.4 | 80 | 13 | 6 | 180 |
گزینه های پایان ماشین | گزینه های مهره پیچ |
 |  |
| لطفا برای راه حل های سفارشی با HOLRY تماس بگیرید. | |

برنامه های کاربردی

سوالات متداول
استپر موتور یک دستگاه الکترومغناطیسی است که پالس های دیجیتال را به چرخش شفت مکانیکی تبدیل می کند.از مزایای موتورهای پله ای می توان به هزینه کم، قابلیت اطمینان بالا، گشتاور بالا در سرعت های پایین و ساختاری ساده و ناهموار که تقریباً در هر محیطی کار می کند، اشاره کرد.

موتورهای پله ای به این دلیل نامیده می شوند که هر پالس برق موتور را یک پله می چرخاند.موتورهای پله ای توسط یک درایور کنترل می شوند، که پالس ها را به موتور می فرستد و باعث چرخش آن می شود.
زاویه استپ به عنوان زاویه ای تعریف می شود که از طریق آن شفت استپر موتور برای هر پالس فرمان می چرخد.
اگر نیروی خارجی به موتور پلهای در زمان توقف اما با انرژی وارد شود، نیروی جاذبه ایجاد شده بین روتور و استاتور برای حفظ موقعیت توقف موتور عمل میکند .این گشتاور تحمل نیروی خارجی را گشتاور نگهدارنده می گویند.


