-
Q Hvordan feilsøker jeg vanlige problemer med trinnmotorer?
En
sjekk for løse tilkoblinger, verifiser strømforsyningskompatibilitet, sikre riktig ledning og polaritet og inspiser for mekaniske hindringer. Hvis problemer vedvarer, kan du gjennomgå kontrollerinnstillingene og vurdere testing med en annen driver eller kontroller for å isolere problemet.
-
Q Hva er vanlige anvendelser av trinnmotorer?
En
trinnmotorer finner applikasjoner innen forskjellige felt, inkludert robotikk, 3D -utskrift, CNC -maskiner, medisinsk utstyr og automatiseringssystemer. Deres evne til å gi presis kontroll gjør dem egnet for oppgaver som krever nøyaktig posisjonering.
-
Q Hvordan kan jeg kontrollere en trinnmotor?
En
trinnmotorer kan kontrolleres ved hjelp av dedikerte trinnmotorkontrollere, mikrokontrollere eller spesialiserte trinnmotordriver -IC -er. Populære kontrollmetoder inkluderer full-trinn, halvtrinn og mikrostpping, og hver påvirker motorisk ytelse og oppløsning.
-
Q Hva er forskjellen mellom bipolare og unipolare trinnmotorer?
A
Hovedforskjellen ligger i den svingete konfigurasjonen. Bipolare motorer har to spoler per fase, og strømstrømmer i begge retninger, mens unipolare motorer har en midt-tappet vikling og strømstrømmer i en retning. Bipolare motorer tilbyr generelt høyere dreiemoment.
-
Q Kan jeg kjøre en trinnmotor uten en dedikert sjåfør?
En
stund er det mulig å kjøre en trinnmotor direkte fra en mikrokontroller, ved bruk av en dedikert trinnmotordriver anbefales for bedre ytelse og beskyttelse mot overstrøm og overoppheting. Trinnmotordrivere gir nødvendig strømkontroll og bølgeformforming for optimal motorisk drift.
-
Q Hva er forskjellen mellom bipolare og unipolare trinnmotorer?
A
Hovedforskjellen ligger i den svingete konfigurasjonen. Bipolare motorer har to spoler per fase, mens unipolare motorer har en midt-tappet vikling. Bipolare motorer gir generelt høyere dreiemoment, men unipolare motorer er lettere å kontrollere.
-
Q Hvordan feilsøker jeg vanlige problemer med trinnmotorer?
En
sjekk for løse tilkoblinger, verifiser strømforsyningskompatibilitet, inspiser kabling for riktig polaritet, og sørg for at det ikke er noen mekaniske hindringer. Gjennomgang av kontrollerinnstillinger og testing med en alternativ kontroller eller driver kan bidra til å identifisere og løse problemer.
-
Q Krever trinnmotorer tilbakemelding for posisjonskontroll?
En
stund trinnmotorer kan fungere i et åpen sløyfesystem uten tilbakemelding, lukkede sløyfesystemer med tilbakemeldingsenheter som kodere eller sensorer brukes i applikasjoner der presis posisjonskontroll og feilkorreksjon er essensiell.
-
Q Hva er mikrostpping, og hvordan forbedrer det trinnmotorens ytelse?
En
mikrostepping er en teknikk som deler hvert fulle trinn av en trinnmotor i mindre undertrinn. Dette muliggjør jevnere bevegelse, redusert vibrasjon og forbedret posisjonsnøyaktighet, spesielt i lave hastigheter.
-
Q Hva er betydningen av trinnvinkel i trinnmotorer?
En
trinnvinkel er vinkelen som motoren roterer for hver inngangspuls. Det er en kritisk parameter som bestemmer motorens oppløsning og nøyaktighet. Mindre trinnvinkler resulterer i finere kontroll, men kan kreve mer kompleks drivende elektronikk.
-
Q Hva er nøkkelkomponentene i et trinnmotorsystem?
Et
trinnmotorsystem består av selve steppermotoren, en driver for å kontrollere motoren, og en kontroller eller mikrokontroller som genererer sekvensen av pulser for å drive motoren.
-
Q Hva er en trinnmotor, og hvordan skiller den seg fra andre typer motorer?
En
trinnmotor er en elektromekanisk enhet som konverterer elektriske pulser til presise mekaniske bevegelser. I motsetning til andre motorer, beveger den seg i diskrete trinn, noe som gir nøyaktig kontroll av posisjon og hastighet.
-
Q Kan Stepper Motors operere i en åpen sløyfekonfigurasjon?
Et
ja, steppermotorer kan fungere i et åpent sløyfesystem, der posisjonskontroll oppnås uten eksterne tilbakemeldingsenheter. For kritiske applikasjoner kan imidlertid lukkede sløyfesystemer med tilbakemelding foretrekkes å forbedre nøyaktigheten og rette feil.
-
Q Hva er mikrostpping, og hvorfor er det viktig?
En
mikrostepping er en teknikk som deler hvert fulle trinn av en trinnmotor i mindre trinn. Dette gir jevnere bevegelse, reduserer vibrasjon og forbedrer nøyaktigheten. Mikrostepping er viktig for applikasjoner som krever presisjon.
-
Q Hvordan bestemmes trinnoppløsningen til en trinnmotor?
EN
Trinnoppløsning er den minste vinkelen motoren kan bevege seg som svar på en enkelt inngangspuls. Det bestemmes av motorens konstruksjon, antall polakker og Drive Electronics. Høyere poltall og mikrostepping kan forbedre oppløsningen.
For å beregne trinnoppløsningen, kan du bruke følgende formel:
-
Q Hva er fordelene ved å bruke Stepper Motors?
En
trinnmotorer gir presis kontroll av bevegelse, høyt dreiemoment i lave hastigheter, enkelhet i kontroll og åpen sløyfe (ingen tilbakemeldinger kreves). De er ideelle for applikasjoner som krever nøyaktig posisjonskontroll.
-
Q Hva er en trinnmotor, og hvordan fungerer den?
EN
Her er en oversikt over hvordan en trinnmotor fungerer :
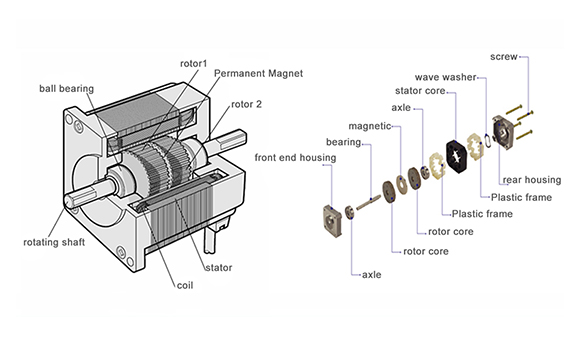
Konstruksjon:
En typisk steppermotor omfatter en rotor og en stator. Rotoren er den roterende delen, mens statoren er den stasjonære delen. Rotoren er vanligvis utstyrt med tenner eller en magnetisk struktur som samhandler med magnetfeltene generert av statoren.
Stator og viklinger:
Statoren inneholder spoler av trådsår rundt stolper. Disse spolene blir energisk sekvensielt for å skape et roterende magnetfelt. Antall poler og viklinger i motoren bestemmer trinnvinkelen, som er vinkelen som motoren roterer for hver inngangspuls gjennom.
Magnetisk interaksjon:
Når en elektrisk strøm påføres en spole i statoren, genererer den et magnetfelt. Rotoren, som vanligvis er laget av et permanent magnet eller ferromagnetisk materiale, justerer seg med magnetfeltet som er laget av den energiserte stator -spolen. Dette får rotoren til å bevege seg til en bestemt stilling.
Trinn rotasjon:
Steppermotorer beveger seg i diskrete trinn, og rotasjonsvinkelen for hvert trinn bestemmes av motorens design. Sekvensen for å energiske stator -spolene dikterer retningen og avstanden til hvert trinn. Ved å kontrollere sekvensen til disse pulser, oppnås presis kontroll over motorens posisjon og hastighet.
Kontrollsignaler:
For å betjene en trinnmotor, sender en kontroller eller mikrokontroller en serie elektriske pulser til motorens statorviklinger. Rekkefølgen og tidspunktet for disse pulser bestemmer motorens retning og hastighet. Denne kontrollmetoden muliggjør nøyaktig posisjonering uten behov for eksterne sensorer.
Full-trinn og mikrostpping:
Trinnmotorer kan operere i full trinn-modus, der hver puls tilsvarer et enkelt trinn. Alternativt deler mikrostepping hvert trinn i mindre trinn, og gir jevnere bevegelse og finere oppløsning. Mikrostepping oppnås ved å kontrollere strømmen i motorens spoler mer presist.
-
Q Hva er den viktigste grunnen til å bruke en trinnmotor?
En
i hovedsak gir steppermotorer utmerket hastighetskontroll, presis posisjonering og repeterbarhet av bevegelse. Steppermotorer er også veldig pålitelige fordi det ikke er noen kontaktbørster i motoren. Dette minimerer mekanisk svikt og maksimerer motorens levetid. Dessuten er steppermotorer rimeligere enn andre motorer og har et bredt spekter av applikasjoner.
-
Q Hvorfor er trinnmotorer viktige?
En
trinnmotorer kan produsere fullt, øyeblikkelig dreiemoment - selv fra stillstand. Dette gjør dem veldig nyttige for bevegelseskontrollapplikasjoner, der nøyaktighet, repeterbarhet og kraft er avgjørende.
-
Q Hva er trinnmotorisk forklaring?
En
trinnmotorer er DC -motorer som beveger seg i diskrete trinn. De har flere spoler som er organisert i grupper kalt 'faser '. Ved å gi energi hver fase i sekvens, vil motoren rotere, ett trinn av gangen. Med en datamaskinkontrollert trinn kan du oppnå veldig presis posisjonering og/eller hastighetskontroll.
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు