-
Q Bagaimana cara memecahkan masalah umum pada motor stepper?
A Periksa sambungan yang longgar, verifikasi kompatibilitas catu daya, pastikan kabel dan polaritasnya tepat, dan periksa apakah ada hambatan mekanis.Jika masalah terus berlanjut, tinjau pengaturan pengontrol, dan pertimbangkan pengujian dengan driver atau pengontrol lain untuk mengisolasi masalahnya.
-
Q Apa saja aplikasi umum motor stepper?
Motor Stepper menemukan aplikasi di berbagai bidang, termasuk robotika, pencetakan 3D, mesin CNC, peralatan medis, dan sistem otomasi.Kemampuannya untuk memberikan kontrol yang tepat membuatnya cocok untuk tugas yang memerlukan penentuan posisi yang akurat.
-
Q Bagaimana cara mengontrol motor stepper?
Motor Stepper dapat dikontrol menggunakan pengontrol motor stepper khusus, mikrokontroler, atau IC driver motor stepper khusus.Metode pengendalian yang populer meliputi langkah penuh, setengah langkah, dan langkah mikro, yang masing-masing memengaruhi kinerja dan resolusi motor.
-
Q Apa perbedaan antara motor stepper bipolar dan unipolar?
A Perbedaan utamanya terletak pada konfigurasi belitan.Motor bipolar memiliki dua kumparan per fase, dan arus mengalir dalam dua arah, sedangkan motor unipolar memiliki belitan yang disadap di tengah, dan arus mengalir dalam satu arah.Motor bipolar umumnya menawarkan torsi lebih tinggi.
-
Q Bisakah saya menjalankan motor stepper tanpa driver khusus?
J Meskipun motor stepper dapat dijalankan langsung dari mikrokontroler, disarankan untuk menggunakan driver motor stepper khusus untuk kinerja yang lebih baik dan perlindungan terhadap arus berlebih dan panas berlebih.Driver motor stepper memberikan kontrol arus dan pembentukan gelombang yang diperlukan untuk pengoperasian motor yang optimal.
-
Q Apa perbedaan antara motor stepper bipolar dan unipolar?
A Perbedaan utamanya terletak pada konfigurasi belitan.Motor bipolar memiliki dua kumparan per fase, sedangkan motor unipolar memiliki belitan yang disadap pusat.Motor bipolar umumnya memberikan torsi lebih tinggi, namun motor unipolar lebih mudah dikendalikan.
-
Q Bagaimana cara memecahkan masalah umum pada motor stepper?
A Periksa sambungan yang longgar, verifikasi kompatibilitas catu daya, periksa polaritas kabel yang benar, dan pastikan tidak ada penghalang mekanis.Meninjau pengaturan pengontrol dan menguji dengan pengontrol atau driver alternatif dapat membantu mengidentifikasi dan menyelesaikan masalah.
-
Q Apakah motor stepper memerlukan umpan balik untuk kontrol posisi?
J Meskipun motor stepper dapat beroperasi dalam sistem loop terbuka tanpa umpan balik, sistem loop tertutup dengan perangkat umpan balik seperti encoder atau sensor digunakan dalam aplikasi yang memerlukan kontrol posisi yang tepat dan koreksi kesalahan.
-
Q Apa itu microstepping, dan bagaimana cara meningkatkan performa motor stepper?
Microstepping adalah teknik yang membagi setiap langkah penuh motor stepper menjadi sub-langkah yang lebih kecil.Hal ini memungkinkan gerakan lebih halus, mengurangi getaran, dan meningkatkan akurasi posisi, terutama pada kecepatan rendah.
-
Q Apa pentingnya sudut langkah pada motor stepper?
Sudut langkah adalah sudut yang dilalui motor untuk setiap pulsa masukan.Ini adalah parameter penting yang menentukan resolusi dan akurasi motor.Sudut langkah yang lebih kecil menghasilkan kontrol yang lebih baik namun mungkin memerlukan elektronik penggerak yang lebih kompleks.
-
Q Apa saja komponen kunci dari sistem motor stepper?
A Sistem motor stepper terdiri dari motor stepper itu sendiri, driver untuk mengendalikan motor, dan pengontrol atau mikrokontroler yang menghasilkan urutan pulsa untuk menggerakkan motor.
-
Q Apa itu motor stepper, dan apa bedanya dengan motor jenis lain?
A Motor stepper adalah perangkat elektromekanis yang mengubah pulsa listrik menjadi gerakan mekanis yang presisi.Tidak seperti motor lainnya, motor ini bergerak dalam langkah-langkah terpisah, memungkinkan kontrol posisi dan kecepatan yang akurat.
-
Q Dapatkah motor stepper beroperasi dalam konfigurasi loop terbuka?
J Ya, motor stepper dapat beroperasi dalam sistem loop terbuka, dimana kontrol posisi dicapai tanpa perangkat umpan balik eksternal.Namun, untuk aplikasi kritis, sistem loop tertutup dengan umpan balik mungkin lebih disukai untuk meningkatkan akurasi dan memperbaiki kesalahan.
-
T Apa itu microstepping dan mengapa itu penting?
Microstepping adalah teknik yang membagi setiap langkah penuh motor stepper menjadi langkah-langkah yang lebih kecil.Ini memberikan gerakan yang lebih halus, mengurangi getaran, dan meningkatkan akurasi.Microstepping sangat penting untuk aplikasi yang menuntut presisi.
-
Q Bagaimana resolusi langkah motor stepper ditentukan?
A Resolusi langkah adalah sudut terkecil yang dapat digerakkan motor sebagai respons terhadap satu pulsa masukan.Hal ini ditentukan oleh konstruksi motor, jumlah kutub, dan elektronik penggerak.Jumlah tiang yang lebih tinggi dan microstepping dapat meningkatkan resolusi.
Untuk menghitung resolusi langkah, Anda dapat menggunakan rumus berikut:
-
Q Apa keuntungan menggunakan motor stepper?
Motor Stepper menawarkan kontrol gerakan yang presisi, torsi tinggi pada kecepatan rendah, kesederhanaan kontrol, dan pengoperasian loop terbuka (tidak memerlukan umpan balik).Mereka ideal untuk aplikasi yang memerlukan kontrol posisi yang akurat.
-
Q Apa itu motor stepper dan bagaimana cara kerjanya?
A Berikut rincian cara kerja motor stepper :
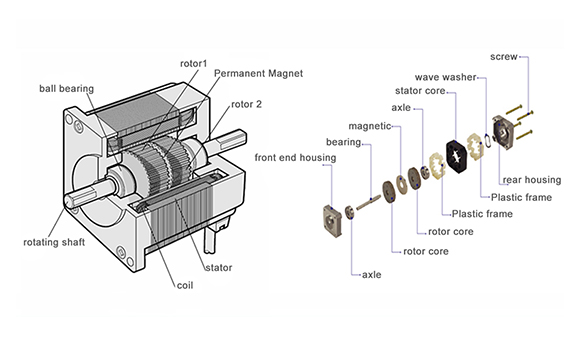
Konstruksi:
Motor stepper tipikal terdiri dari rotor dan stator.Rotor merupakan bagian yang berputar, sedangkan stator merupakan bagian yang diam.Rotor biasanya dilengkapi dengan gigi atau struktur magnet yang berinteraksi dengan medan magnet yang dihasilkan oleh stator.
Stator dan Belitan:
Stator berisi gulungan kawat yang dililitkan pada kutub.Kumparan ini diberi energi secara berurutan untuk menciptakan medan magnet yang berputar.Jumlah kutub dan belitan pada motor menentukan sudut langkahnya, yaitu sudut putaran motor untuk setiap pulsa masukan.
Interaksi Magnetik:
Ketika arus listrik dialirkan ke kumparan di stator, maka akan timbul medan magnet.Rotor, yang biasanya terbuat dari magnet permanen atau bahan feromagnetik, menyelaraskan dirinya dengan medan magnet yang diciptakan oleh kumparan stator berenergi.Hal ini menyebabkan rotor berpindah ke posisi tertentu.
Rotasi Langkah:
Motor stepper bergerak dalam langkah-langkah terpisah, dan sudut putaran untuk setiap langkah ditentukan oleh desain motor.Urutan pemberian energi pada kumparan stator menentukan arah dan jarak setiap langkah.Dengan mengontrol urutan pulsa ini, kontrol yang tepat atas posisi dan kecepatan motor dapat dicapai.
Sinyal Kontrol:
Untuk mengoperasikan motor stepper, pengontrol atau mikrokontroler mengirimkan serangkaian pulsa listrik ke belitan stator motor.Urutan dan waktu pulsa ini menentukan arah dan kecepatan motor.Metode kontrol ini memungkinkan penentuan posisi yang akurat tanpa memerlukan sensor eksternal.
Langkah Penuh dan Microstepping:
Motor stepper dapat beroperasi dalam mode langkah penuh, di mana setiap pulsa berhubungan dengan satu langkah.Sebagai alternatif, microstepping membagi setiap langkah menjadi beberapa langkah yang lebih kecil, memberikan gerakan yang lebih halus dan resolusi yang lebih baik.Microstepping dicapai dengan mengontrol arus pada kumparan motor secara lebih tepat.
-
Q Apa alasan utama menggunakan motor stepper?
Pada dasarnya, motor stepper memberikan kontrol kecepatan yang sangat baik, penentuan posisi yang tepat, dan pengulangan gerakan.Selain itu, motor stepper sangat andal karena tidak ada sikat kontak di dalam motor.Hal ini meminimalkan kegagalan mekanis dan memaksimalkan umur motor.Selain itu, motor stepper lebih terjangkau dibandingkan motor lain dan memiliki beragam aplikasi.
-
Q Mengapa motor stepper penting?
Motor Stepper dapat menghasilkan torsi penuh dan seketika - bahkan dalam keadaan diam.Hal ini membuatnya sangat berguna untuk aplikasi kontrol gerak, yang mengutamakan akurasi, pengulangan, dan kekuatan.
-
Q Apa penjelasan motor stepper?
Motor Stepper adalah motor DC yang bergerak dalam langkah-langkah diskrit.Mereka memiliki beberapa kumparan yang disusun dalam kelompok yang disebut “fase”.Dengan memberi energi pada setiap fase secara berurutan, motor akan berputar, selangkah demi selangkah.Dengan loncatan yang dikendalikan komputer, Anda dapat mencapai penentuan posisi dan/atau kontrol kecepatan yang sangat tepat.