-
Q Stepper Motors의 일반적인 문제를 해결하려면 어떻게해야합니까?
느슨한 연결을 점검
하고 전원 공급 장치 호환성을 확인하고 적절한 배선 및 극성을 보장하며 기계적 장애물을 검사하십시오. 문제가 지속되면 컨트롤러 설정을 검토하고 다른 드라이버 또는 컨트롤러로 테스트하여 문제를 분리하십시오.
-
Q Stepper Motors의 일반적인 응용은 무엇입니까?
스테퍼
모터는 로봇 공학, 3D 프린팅, CNC 기계, 의료 기기 및 자동화 시스템을 포함한 다양한 분야에서 응용 프로그램을 찾습니다. 정확한 제어 기능을 제공하는 능력은 정확한 포지셔닝이 필요한 작업에 적합합니다.
-
Q 스테퍼 모터를 어떻게 제어 할 수 있습니까?
스테퍼
모터는 전용 스테퍼 모터 컨트롤러, 마이크로 컨트롤러 또는 특수 스테퍼 모터 드라이버 IC를 사용하여 제어 할 수 있습니다. 인기있는 제어 방법에는 전체 단계, 반 단계 및 마이크로 스테핑이 포함되며, 각각의 모터 성능 및 해상도에 영향을 미칩니다.
-
Q 양극성 스테퍼 모터의 차이점은 무엇입니까?
A
주요 차이점은 와인딩 구성에 있습니다. 바이폴라 모터는 위상 당 2 개의 코일을 가지며, 전류는 양방향으로 흐르고, 단극 모터는 중앙 탭 권선을 가지며 전류는 한 방향으로 흐릅니다. 양극성 모터는 일반적으로 더 높은 토크를 제공합니다.
-
Q 전용 드라이버없이 스테퍼 모터를 실행할 수 있습니까?
.
전용 스테퍼 모터 드라이버를 사용하여 마이크로 컨트롤러에서 스테퍼 모터를 직접 실행할 수 있습니다. 과전류 및 과열로부터 더 나은 성능과 보호를 위해서는 전용 스테퍼 모터 드라이버를 사용하는 것이 좋습니다 스테퍼 모터 드라이버는 최적의 모터 작동에 필요한 전류 제어 및 파형 모양을 제공합니다.
-
Q 양극성 스테퍼 모터의 차이점은 무엇입니까?
A
주요 차이점은 와인딩 구성에 있습니다. 바이폴라 모터에는 위상 당 2 개의 코일이 있으며, 단극 모터는 중앙 탭 권선을 갖습니다. 바이폴라 모터는 일반적으로 더 높은 토크를 제공하지만 단극 모터는 제어하기가 더 쉽습니다.
-
Q Stepper Motors의 일반적인 문제를 해결하려면 어떻게해야합니까?
느슨한 연결을 점검
하고 전원 공급 장치 호환성을 확인하고 배선에 올바른 극성을 검사하고 기계적 장애물이 없는지 확인하십시오. 대체 컨트롤러 또는 드라이버로 컨트롤러 설정 및 테스트를 검토하면 문제를 식별하고 해결하는 데 도움이 될 수 있습니다.
-
Q 스테퍼 모터에 위치 제어에 대한 피드백이 필요합니까?
Stepper
Motors는 피드백없이 오픈 루프 시스템에서 작동 할 수 있으며, 인코더 또는 센서와 같은 피드백 장치가있는 폐 루프 시스템은 정확한 위치 제어 및 오류 수정이 필수적인 응용 분야에서 사용됩니다.
-
Q microstping 란 무엇이며 스테퍼 모터 성능을 어떻게 향상 시키는가?
마이크로
스투핑은 스테퍼 모터의 각 단계를 작은 하위 단계로 나누는 기술입니다. 이를 통해 특히 저속에서 더 부드러운 움직임, 진동 감소 및 향상된 위치 정확도가 가능합니다.
-
Q Stepper Motors에서 스텝 각도의 중요성은 무엇입니까?
단계
각도는 모터가 각 입력 펄스에 대해 회전하는 각도입니다. 모터의 해상도와 정확도를 결정하는 중요한 매개 변수입니다. 더 작은 단계 각도는 더 미세한 제어를 가져 오지만 더 복잡한 드라이브 전자 장치가 필요할 수 있습니다.
-
Q 스테퍼 모터 시스템의 주요 구성 요소는 무엇입니까?
스테퍼
모터 시스템은 스테퍼 모터 자체, 모터를 제어하는 드라이버, 모터를 구동하기 위해 일련의 펄스를 생성하는 컨트롤러 또는 마이크로 컨트롤러로 구성됩니다.
-
Q 스테퍼 모터 란 무엇이며 다른 유형의 모터와 어떻게 다릅니 까?
스테퍼
모터는 전기 펄스를 정확한 기계적 움직임으로 변환하는 전자 기계 장치입니다. 다른 모터와 달리 개별 단계로 이동하여 위치와 속도를 정확하게 제어 할 수 있습니다.
-
Q Stepper Motors가 오픈 루프 구성에서 작동 할 수 있습니까?
예
, 스테퍼 모터는 외부 피드백 장치없이 위치 제어가 달성되는 오픈 루프 시스템에서 작동 할 수 있습니다. 그러나 중요한 응용 분야의 경우, 정확성을 향상시키고 올바른 오류를 향상시키기 위해 피드백이있는 폐 루프 시스템이 선호 될 수 있습니다.
-
Q microstping이란 무엇이며 왜 중요한가요?
마이크로
스투핑은 스테퍼 모터의 각 전체 단계를 더 작은 단위로 나누는 기술입니다. 이것은 더 부드러운 움직임을 제공하고 진동을 줄이며 정확도를 향상시킵니다. 마이크로 스테핑은 정밀도를 요구하는 응용 프로그램에 필수적입니다.
-
Q 스테퍼 모터의 단계 해상도는 어떻게 결정됩니까?
에이
스텝 해상도는 단일 입력 펄스에 응답하여 모터가 움직일 수있는 가장 작은 각도입니다. 모터의 구조, 극의 수 및 구동 전자 장치에 의해 결정됩니다. 더 높은 극 수와 마이크로 스투핑은 해상도를 향상시킬 수 있습니다.
단계 해상도를 계산하려면 다음 공식을 사용할 수 있습니다.
-
Q Stepper Motors 사용의 장점은 무엇입니까?
스테퍼
모터는 운동의 정확한 제어, 저속의 높은 토크, 제어 단순성 및 오픈 루프 작동 (피드백 필요 없음)을 제공합니다. 정확한 위치 제어가 필요한 응용 프로그램에 이상적입니다.
-
Q 스테퍼 모터 란 무엇이며 어떻게 작동합니까?
에이
에 대한 고장은 다음과 같습니다 스테퍼 모터가 어떻게 작동하는지 .
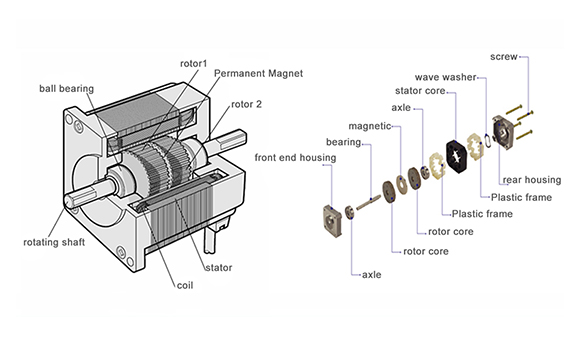
건설:
전형적인 스테퍼 모터는 로터와 고정자로 구성됩니다. 로터는 회전 부분이고 고정자는 고정 부분입니다. 로터는 일반적으로 고정자에 의해 생성 된 자기장과 상호 작용하는 치아 또는 자기 구조가 장착된다.
고정자 및 권선 :
고정자에는 기둥 주위의 와이어 상처 코일이 들어 있습니다. 이 코일은 회전 자기장을 생성하기 위해 순차적으로 에너지를 제공합니다. 모터의 극과 권선의 수는 계단 각도를 결정합니다. 이는 모터가 각 입력 펄스에 대해 회전하는 각도입니다.
자기 상호 작용 :
고정자의 코일에 전류가 적용되면 자기장이 생성됩니다. 전형적으로 영구 자석 또는 강자성 물질로 만들어진 로터는 에너지 고정자 코일에 의해 생성 된 자기장과 정렬된다. 이로 인해 로터가 특정 위치로 이동합니다.
단계 회전 :
스테퍼 모터는 불연속 단계로 움직이고 각 단계의 회전 각도는 모터의 설계에 의해 결정됩니다. 고정자 코일에 활력을 불어 넣는 시퀀스는 각 단계의 방향과 거리를 지시합니다. 이들 펄스의 시퀀스를 제어함으로써, 모터의 위치와 속도에 대한 정확한 제어가 달성된다.
제어 신호 :
스테퍼 모터를 작동시키기 위해 컨트롤러 또는 마이크로 컨트롤러는 모터의 고정자 권선에 일련의 전기 펄스를 보냅니다. 이 펄스의 순서와 타이밍은 모터의 방향과 속도를 결정합니다. 이 제어 방법을 사용하면 외부 센서가 필요하지 않고 정확한 포지셔닝을 허용합니다.
전체 단계 및 마이크로 스투핑 :
스테퍼 모터는 전체 단계 모드에서 작동 할 수 있으며, 여기서 각 펄스는 단일 단계에 해당합니다. 대안 적으로, Microstping은 각 단계를 더 작은 단위로 세분화하여 더 부드러운 움직임과 더 미세한 해상도를 제공합니다. 마이크로 스투핑은 모터 코일의 전류를보다 정확하게 제어함으로써 달성됩니다.
-
Q 스테퍼 모터를 사용하는 주된 이유는 무엇입니까?
본질적으로 스테퍼
모터는 탁월한 속도 제어, 정확한 위치 및 반복 운동을 제공합니다. 또한 스테퍼 모터는 모터에 접촉 브러시가 없기 때문에 매우 신뢰할 수 있습니다. 이것은 기계적 고장을 최소화하고 모터의 수명을 최대화합니다. 또한 Stepper Motors는 다른 모터보다 저렴하며 광범위한 응용 프로그램이 있습니다.
-
Q 스테퍼 모터가 왜 중요한가요?
스테퍼
모터는 정지 상태에서도 완전한 순간 토크를 생성 할 수 있습니다. 이로 인해 정확도, 반복성 및 전력이 가장 중요한 모션 제어 응용 프로그램에 매우 유용합니다.
-
Q Stepper Motor 설명이란 무엇입니까?
스테퍼
모터는 개별 단계로 이동하는 DC 모터입니다. 그들은 '위상 '라는 그룹으로 구성된 여러 코일이 있습니다. 각 단계에 순서대로 에너지를 공급함으로써 모터는 한 번에 한 단계 씩 회전합니다. 컴퓨터 제어 스텝핑을 사용하면 매우 정확한 위치 및/또는 속도 제어를 달성 할 수 있습니다.
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు