-
Q Comment résoudre les problèmes courants avec les moteurs pas à pas?
Une
vérification des connexions lâches, vérifiez la compatibilité de l'alimentation, assurez-vous un câblage et une polarité appropriés et inspecter les obstructions mécaniques. Si les problèmes persistent, examinez les paramètres du contrôleur et envisagez de tester avec un pilote ou un contrôleur différent pour isoler le problème.
-
Q Quelles sont les applications courantes des moteurs pas à pas?
Un
Stepper Motors trouvera des applications dans divers domaines, notamment la robotique, l'impression 3D, les machines CNC, les dispositifs médicaux et les systèmes d'automatisation. Leur capacité à fournir un contrôle précis les rend adaptées aux tâches nécessitant un positionnement précis.
-
Q Comment puis-je contrôler un moteur pas à pas?
Un
stepper peut être contrôlé à l'aide de contrôleurs de moteur pas à pas dédiés, de microcontrôleurs ou de circuits intégrés spécialisés de pilote de moteur pas à pas. Les méthodes de contrôle populaires incluent le pas complet, le demi-pas et le microste, chacun influençant les performances et la résolution du moteur.
-
Q Quelle est la différence entre les moteurs de pas à pas bipolaires et unipolaires?
A
La différence principale réside dans la configuration de l'enroulement. Les moteurs bipolaires ont deux bobines par phase, et les flux de courant dans les deux directions, tandis que les moteurs unipolaires ont un enroulement sur ponction central et les flux de courant dans une direction. Les moteurs bipolaires offrent généralement un couple plus élevé.
-
Q Puis-je exécuter un moteur pas à pas sans pilote dédié?
Un
certain temps, il est possible d'exécuter un moteur pas à pas directement à partir d'un microcontrôleur, l'utilisation d'un conducteur de moteur pas à pas dédié est recommandée pour de meilleures performances et protection contre la surintensité et la surchauffe. Les pilotes de moteur pas à pas fournissent le contrôle de courant et la forme de forme d'onde nécessaire pour le fonctionnement optimal du moteur.
-
Q Quelle est la différence entre les moteurs de pas à pas bipolaires et unipolaires?
A
La différence principale réside dans la configuration de l'enroulement. Les moteurs bipolaires ont deux bobines par phase, tandis que les moteurs unipolaires ont un enroulement sur ponction central. Les moteurs bipolaires fournissent généralement un couple plus élevé, mais les moteurs unipolaires sont plus faciles à contrôler.
-
Q Comment résoudre les problèmes courants avec les moteurs pas à pas?
Une
vérification des connexions lâches, vérifiez la compatibilité de l'alimentation, inspectez le câblage pour une polarité correcte et assurez-vous qu'il n'y a pas d'obstructions mécaniques. La révision des paramètres du contrôleur et les tests avec un autre contrôleur ou pilote peuvent aider à identifier et à résoudre les problèmes.
-
Q Les moteurs pas à pas nécessitent-ils des commentaires pour le contrôle de la position?
Des
moteurs pas à pas peuvent fonctionner dans un système en boucle ouverte sans rétroaction, des systèmes en boucle fermée avec des dispositifs de rétroaction comme les encodeurs ou les capteurs sont utilisés dans des applications où le contrôle de position précis et la correction d'erreurs sont essentiels.
-
Q Qu'est-ce que le microste et comment améliore-t-il les performances du moteur pas à pas?
Un
microste est une technique qui divise chaque étape complète d'un moteur pas à pas en sous-étapes plus petites. Cela permet un mouvement plus fluide, des vibrations réduites et une précision de positionnement améliorée, en particulier à basse vitesse.
-
Q Quelle est la signification de l'angle de pas dans les moteurs pas à pas?
Un
angle de pas est l'angle par lequel le moteur tourne pour chaque impulsion d'entrée. Il s'agit d'un paramètre critique qui détermine la résolution et la précision du moteur. Les angles de pas plus petits entraînent un contrôle plus fin mais peuvent nécessiter une électronique d'entraînement plus complexe.
-
Q Quels sont les composants clés d'un système de moteur pas à pas?
Un
système de moteur pas à pas se compose du moteur pas à pas lui-même, d'un conducteur pour contrôler le moteur et d'un contrôleur ou d'un microcontrôleur qui génère la séquence d'impulsions pour conduire le moteur.
-
Q Qu'est-ce qu'un moteur pas à pas et en quoi diffère-t-il des autres types de moteurs?
Un
moteur pas à pas est un appareil électromécanique qui convertit les impulsions électriques en mouvements mécaniques précis. Contrairement à d'autres moteurs, il se déplace par étapes discrètes, permettant un contrôle précis de la position et de la vitesse.
-
Q Les moteurs pas à pas peuvent-ils fonctionner dans une configuration en boucle ouverte?
Un
oui, les moteurs pas à pas peuvent fonctionner dans un système en boucle ouverte, où le contrôle de position est obtenu sans dispositifs de rétroaction externes. Cependant, pour les applications critiques, les systèmes en boucle fermée avec rétroaction peuvent être préférés pour améliorer la précision et les erreurs correctes.
-
Q Qu'est-ce que le microste et pourquoi est-il important?
Un
microste est une technique qui divise chaque étape complète d'un moteur pas à pas en incréments plus petits. Cela fournit un mouvement plus lisse, réduit les vibrations et améliore la précision. Le micro-application est essentielle pour les applications exigeant une précision.
-
Q Comment la résolution de pas d'un moteur pas à pas est-elle déterminée?
UN
La résolution des pas est le plus petit angle que le moteur peut se déplacer en réponse à une seule impulsion d'entrée. Il est déterminé par la construction du moteur, le nombre de pôles et l'électronique d'entraînement. Le nombre de pôles plus élevé et le microstépage peuvent améliorer la résolution.
Pour calculer la résolution des pas, vous pouvez utiliser la formule suivante:
-
Q Quels sont les avantages de l'utilisation de moteurs pas à pas?
Les
moteurs pas à pas offrent un contrôle précis du mouvement, un couple élevé à basse vitesse, une simplicité de contrôle et un fonctionnement en boucle ouverte (aucune rétroaction requise). Ils sont idéaux pour les applications nécessitant un contrôle de position précis.
-
Q Qu'est-ce qu'un moteur pas à pas et comment ça marche?
UN
Voici une ventilation du fonctionnement d'un moteur pas à pas :
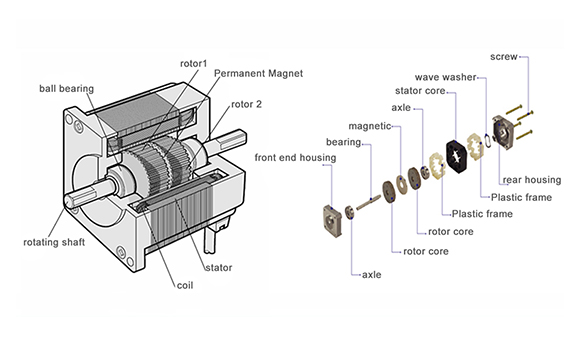
Construction:
Un moteur pas à pas typique comprend un rotor et un stator. Le rotor est la partie rotative, tandis que le stator est la partie stationnaire. Le rotor est généralement équipé de dents ou d'une structure magnétique qui interagit avec les champs magnétiques générés par le stator.
Stator et enroulements:
Le stator contient des bobines de fil enroulées autour des pôles. Ces bobines sont énergisées séquentiellement pour créer un champ magnétique rotatif. Le nombre de pôles et d'énergies dans le moteur détermine son angle de pas, qui est l'angle par lequel le moteur tourne pour chaque impulsion d'entrée.
Interaction magnétique:
Lorsqu'un courant électrique est appliqué à une bobine dans le stator, il génère un champ magnétique. Le rotor, qui est généralement composé d'un aimant permanent ou d'un matériau ferromagnétique, s'aligne sur le champ magnétique créé par la bobine de stator énergisée. Cela fait que le rotor se déplace vers une position spécifique.
Rotation des pas:
Les moteurs pas à pas se déplacent en étapes discrètes et l'angle de rotation pour chaque étape est déterminé par la conception du moteur. La séquence d'énergie des bobines de stator dicte la direction et la distance de chaque étape. En contrôlant la séquence de ces impulsions, un contrôle précis sur la position et la vitesse du moteur est atteint.
Signaux de contrôle:
Pour faire fonctionner un moteur pas à pas, un contrôleur ou un microcontrôleur envoie une série d'impulsions électriques aux enroulements du stator du moteur. L'ordre et le moment de ces impulsions déterminent la direction et la vitesse du moteur. Cette méthode de contrôle permet un positionnement précis sans avoir besoin de capteurs externes.
Pas complet et microste:
Les moteurs pas à pas peuvent fonctionner en mode complet, où chaque impulsion correspond à une seule étape. Alternativement, le micro-divisation subdivide à chaque étape en incréments plus petits, fournissant un mouvement plus lisse et une résolution plus fine. Le microstepping est réalisé en contrôlant plus précisément le courant dans les bobines du moteur.
-
Q Quelle est la principale raison d'utiliser un moteur pas à pas?
Un
essentiellement, les moteurs pas à pas fournissent un excellent contrôle de la vitesse, un positionnement précis et une répétabilité de mouvement. De plus, les moteurs pas à pas sont très fiables car il n'y a pas de pinceaux de contact dans le moteur. Cela minimise la défaillance mécanique et maximise la durée de vie du moteur. De plus, les moteurs pas à pas sont plus abordables que les autres moteurs et ont un large éventail d'applications.
-
Q Pourquoi les moteurs pas à pas sont-ils importants?
Un
stepper peut produire un couple complet et instantané - même à l'arrêt. Cela les rend très utiles pour les applications de contrôle de mouvement, où la précision, la répétabilité et la puissance sont primordiales.
-
Q Qu'est-ce que l'explication du moteur pas à pas?
Les
moteurs pas à pas sont des moteurs à courant continu qui se déplacent en étapes discrètes. Ils ont plusieurs bobines organisées en groupes appelés 'phases '. En dynamisant chaque phase de séquence, le moteur tourne, une étape à la fois. Avec un pas contrôlé par ordinateur, vous pouvez obtenir un positionnement et / ou un contrôle de vitesse très précis.
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు