-
P W jaki sposób rozwiązywać problemy z typowymi problemami z silnikami stepowymi?
Sprawdź
luźne połączenia, weryfikuj zgodność zasilania, zapewnij odpowiednie okablowanie i polaryzację oraz sprawdź, czy pod kątem przeszkód mechanicznych. Jeśli problemy utrzymują się, przejrzyj ustawienia kontrolera i rozważ testowanie z innym sterownikiem lub kontrolerem w celu izolacji problemu.
-
P Jakie są powszechne zastosowania silników krokowych?
Silniki
Stepper znajdują aplikacje w różnych dziedzinach, w tym w robotyce, drukowaniu 3D, maszynach CNC, urządzeniach medycznych i systemach automatyzacji. Ich zdolność do zapewnienia precyzyjnej kontroli sprawia, że są odpowiednie do zadań wymagających dokładnego pozycjonowania.
-
P Jak mogę kontrolować silnik stepowy?
Silniki
krokowe można kontrolować za pomocą dedykowanych kontrolerów silnika krokowego, mikrokontrolerów lub wyspecjalizowanego sterownika silnika krokowego. Popularne metody sterowania obejmują pełny stopień, pół stopnia i mikrostepowanie, każdy wpływający na wydajność i rozdzielczość silnika.
-
Q Jaka jest różnica między bipolarnym i jednobiegunowym silnikami krokowymi?
Główną
różnicą jest konfiguracja uzwojenia. Silniki dwubiegunowe mają dwie cewki na fazę, a prąd przepływa w obu kierunkach, podczas gdy silniki jednobiegunowe mają uzwojenie środkowe, a prąd płynie w jednym kierunku. Silniki dwubiegunowe zazwyczaj oferują wyższy moment obrotowy.
-
P Mogę uruchomić silnik krokowy bez dedykowanego sterownika?
Na
chwilę możliwe jest uruchomienie silnika krokowego bezpośrednio z mikrokontrolera, zaleca się użycie dedykowanego sterownika silnika krokowego w celu lepszej wydajności i ochrony przed nadprądem i przegrzaniem. Sterowniki silników krokowych zapewniają niezbędną kontrolę prądu i kształt fali dla optymalnej pracy silnika.
-
Q Jaka jest różnica między bipolarnym i jednobiegunowym silnikami krokowymi?
Główną
różnicą jest konfiguracja uzwojenia. Silniki dwubiegunowe mają dwie cewki na fazę, podczas gdy silniki jednobiegunowe mają uzwojenie centralne. Silniki dwubiegunowe ogólnie zapewniają wyższy moment obrotowy, ale silniki jednobiegunowe są łatwiejsze do kontrolowania.
-
P W jaki sposób rozwiązywać problemy z typowymi problemami z silnikami stepowymi?
Sprawdź
luźne połączenia, sprawdź zgodność zasilania, sprawdź okablowanie pod kątem prawidłowej polaryzacji i upewnij się, że nie ma mechanicznych przeszkód. Przeglądanie ustawień kontrolera i testowanie za pomocą alternatywnego kontrolera lub sterownika może pomóc zidentyfikować i rozwiązać problemy.
-
Q Czy silniki krokowe wymagają informacji zwrotnej w celu kontroli pozycji?
A
pewność, że silniki krokowe mogą działać w systemie otwartej pętli bez sprzężenia zwrotnego, systemy zwrotne z urządzeniami zwrotnymi, takimi jak enkodery lub czujniki, są używane w aplikacjach, w których niezbędna jest precyzyjna kontrola pozycji i korekta błędów.
-
P Co to jest mikrostepowanie i jak poprawia wydajność silnika steppowego?
Mikrostepowanie
to technika, która dzieli każdy pełny etap silnika krokowego na mniejsze podstępy. Pozwala to na gładszy ruch, zmniejszone wibracje i poprawę dokładności pozycjonowania, szczególnie przy niskich prędkościach.
-
Q Jakie jest znaczenie kąta kroku w silnikach krokowych?
Kąt kroku
to kąt, przez który silnik obraca się dla każdego impulsu wejściowego. Jest to krytyczny parametr, który określa rozdzielczość i dokładność silnika. Mniejsze kąty kroków powodują dokładniejszą kontrolę, ale mogą wymagać bardziej złożonej elektroniki napędowej.
-
P Jakie są kluczowe elementy systemu silnika stpiennego?
System
silnika stepowego składa się z samego silnika krokowego, sterownika do sterowania silnikiem oraz kontrolera lub mikrokontrolera, który generuje sekwencję impulsów do napędzania silnika.
-
P Co to jest silnik krokowy i jak różni się od innych rodzajów silników?
Silnik
stepowy to urządzenie elektromechaniczne, które przekształca impulsy elektryczne w precyzyjne ruchy mechaniczne. W przeciwieństwie do innych silników porusza się w dyskretnych krokach, umożliwiając dokładną kontrolę pozycji i prędkości.
-
Q Czy silniki stepowe mogą działać w konfiguracji otwartej pętli?
Tak
, silniki krokowe mogą działać w systemie otwartej pętli, w którym kontrola pozycji jest osiągana bez zewnętrznych urządzeń zwrotnych. Jednak w przypadku krytycznych zastosowań systemy zamkniętej pętli z informacją zwrotną mogą być preferowane w celu zwiększenia dokładności i poprawienia błędów.
-
P Co to jest mikrostepowanie i dlaczego jest to ważne?
Mikrostepowanie
to technika, która dzieli każdy pełny etap silnika krokowego na mniejsze przyrosty. Zapewnia to gładszy ruch, zmniejsza wibracje i poprawia dokładność. Mikrostepowanie jest niezbędne dla aplikacji wymagających precyzji.
-
P W jaki sposób określa się rozdzielczość stopniowa silnika krokowego?
A
Rozdzielczość kroku jest najmniejszym kątem, jaki silnik może poruszać w odpowiedzi na pojedynczy impuls wejściowy. Jest to określone przez konstrukcję silnika, liczbę słupów i elektronikę napędową. Wyższe liczby bieguna i mikrostepowanie mogą zwiększyć rozdzielczość.
Aby obliczyć rozdzielczość kroku, możesz użyć następującego wzoru:
-
P Jakie są zalety używania silników krokowych?
oferują
Silniki krokowe precyzyjną kontrolę ruchu, wysoki moment obrotowy przy niskiej prędkości, prostotę kontroli i operację otwartej pętli (nie wymaga sprzężenia zwrotnego). Są idealne do aplikacji wymagających dokładnej kontroli pozycji.
-
P Co to jest silnik krokowy i jak to działa?
A
Oto rozkład działania silnika stepowego :
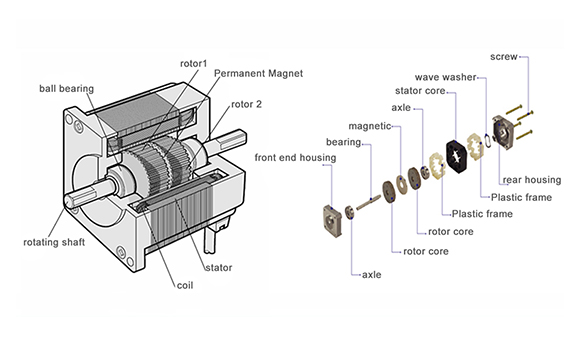
Budowa:
Typowy silnik krokowy zawiera wirnik i stojan. Rotor jest częścią obrotową, a stojan jest częścią stacjonarną. Rotor jest zwykle wyposażony w zęby lub strukturę magnetyczną, która oddziałuje z pól magnetycznych wytwarzanych przez stojana.
Stojany i uzwojenia:
Stojator zawiera cewki rannych z drutu wokół biegunów. Cewki te są energetyzowane sekwencyjnie, aby utworzyć obracające się pole magnetyczne. Liczba słupów i uzwojeń w silniku określa jego kąt kroku, który jest kątem, przez który silnik obraca się dla każdego impulsu wejściowego.
Interakcja magnetyczna:
Gdy prąd elektryczny jest nakładany do cewki w stojanie, generuje pole magnetyczne. Rotor, który jest zwykle wykonany z stałego magnesu lub materiału ferromagnetycznego, wyrównuje się z polem magnetycznym utworzonym przez energetyzowaną cewkę stojana. To powoduje, że wirnik przesuwa się do określonej pozycji.
Rotacja kroku:
Silniki krokowe poruszają się w dyskretnych krokach, a kąt obrotu dla każdego kroku jest określony przez konstrukcję silnika. Sekwencja energetyzowania cewek stojana dyktuje kierunek i odległość każdego kroku. Kontrolując sekwencję tych impulsów, osiągana jest precyzyjna kontrola pozycji i prędkości silnika.
Sygnały kontrolne:
Aby obsługiwać silnik krokowy, kontroler lub mikrokontroler wysyła serię impulsów elektrycznych do uzwojeń stojana silnika. Zakon i czas tych impulsów określa kierunek i prędkość silnika. Ta metoda sterowania pozwala na dokładne pozycjonowanie bez potrzeby zewnętrznych czujników.
Pełny etap i mikrostepowanie:
Silniki krokowe mogą działać w trybie w pełnym stopniu, w którym każdy impuls odpowiada jednym krokowi. Alternatywnie, mikrostepowanie dzieli każdy krok w mniejsze przyrosty, zapewniając gładszy ruch i drobniejsze rozdzielczość. Mikrostepowanie osiąga się poprzez dokładniejsze kontrolowanie prądu w cewkach silnika.
-
P Jaki jest główny powód użycia silnika stepowego?
Zasadniczo
silniki krokowe zapewniają doskonałą kontrolę prędkości, precyzyjne pozycjonowanie i powtarzalność ruchu. Ponadto silniki krokowe są bardzo niezawodne, ponieważ w silniku nie ma szczotek kontaktowych. To minimalizuje awarię mechaniczną i maksymalizuje żywotność silnika. Ponadto silniki krokowe są tańsze niż inne silniki i mają szeroki zakres zastosowań.
-
P Dlaczego silniki stepowe są ważne?
Silniki
krokowe mogą wytwarzać pełny, natychmiastowy moment obrotowy - nawet z zatrzymania. To sprawia, że są bardzo przydatne w aplikacjach kontroli ruchu, w których dokładność, powtarzalność i moc są najważniejsze.
-
P Co to jest wyjaśnienia silnika Stepper?
Silniki
stepowe to silniki DC, które poruszają się w dyskretnych krokach. Mają wiele cewek zorganizowanych w grupach zwanych „fazami ”. Energia każdej fazy w sekwencji silnik obraca się o krok po kroku. Dzięki kontrolowanemu komputerowi przesuwaniu możesz osiągnąć bardzo precyzyjne pozycjonowanie i/lub kontrolę prędkości.
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు