|








簡単な説明
●ステップ角度が小さく、精度が高い。
● 極対の数はローターの歯の数と同じであり、必要に応じて広範囲に変更できます。
●ロータ位置による巻線インダクタンスの変化が少なく、最適な動作制御が容易です。
● 高い磁気エネルギー積を持つ新しい永久磁石材料を使用したアキシャル着磁磁気回路は、モーター性能の向上に貢献します。
● ローターマグネットが励磁を提供します。動作領域全体にわたって重大な振動はありません。
命名規則
| 42 | HB | 40 | F | 105 | B | 06 |
| ① | ② | ③ | ④ | ⑤ | ⑥ | ⑦ |
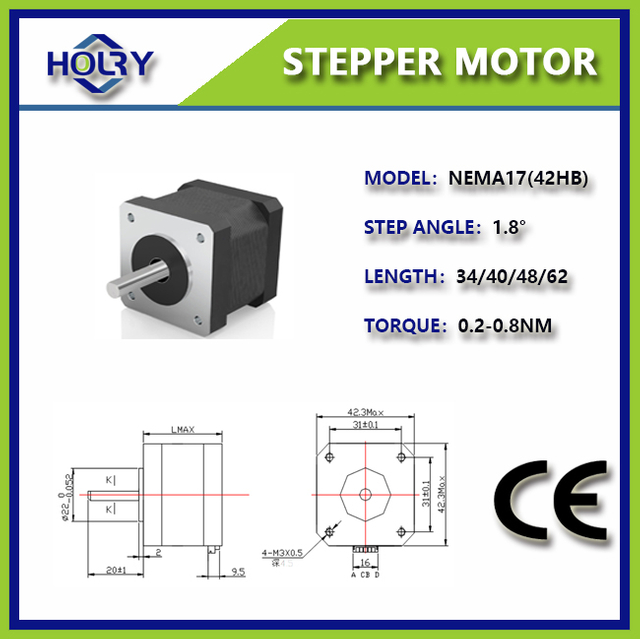
①: 42: モーターベース: 42*42mm
②:HB:ハイブリッドステッピングモーター
③:40:モーター本体長さ
④:F:リード線数:4本、S:6本、E:8本
⑤:105:モーター定格電流値 1.5A
⑥:B:モータ軸に平角線があり、CLはギヤを表します。Dは両出力軸を表します。PJはキー溝を表します。
⑦:06:派生番号
モーターの説明
● ステッピング モーターは低速の場合に使用します。速度は 1000 rpm (0.9 度で 6666PPS) を超えてはならず、1000 ~ 3000PPS (0.9 度) で使用するのが最適です。モーターは高い作業効率と低い騒音を備えています。
● ステッピング モーターのフルステップ状態は使用しない方が良いです。フルステップ状態では振動が大きくなります。
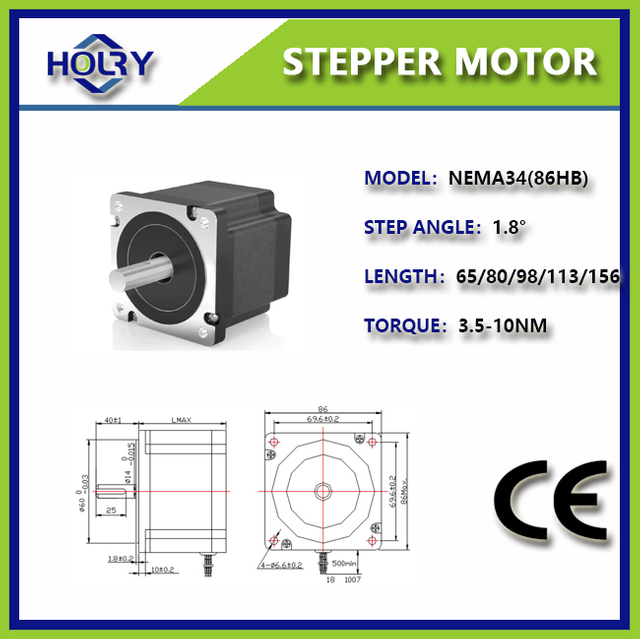
●モータ仕様の電圧値は駆動電圧値ではありません。ステッピングドライバーに応じて特定の駆動電圧を選択できます(推奨:42以下のモーターは12~24Vを使用、57モーターはDC 24V~48Vを使用、86モーターはDC 48~80Vを使用、110モーターはDC 80V以上を採用)
●慣性モーメントが大きい負荷の場合は、枠径の大きなモータを選定してください。
● モータが高速または大きな慣性負荷にさらされている場合、通常は使用速度で起動せず、徐々に周波数と速度を上げていきます。まず、モーターはステップを失いません。第二に、騒音を低減し、停止位置の精度を向上させることができます。
● 高精度の場合は、機械的な減速、モーター速度の増加、または細分化の高いドライバーの使用によって解決する必要があります。
● モーターは振動領域で動作しないようにしてください。必要に応じて、電圧、電流を変更するか、減衰を追加することで解決できます。
● モーターが 600PPS (0.9 度) 未満で動作する場合は、小さな電流、大きなインダクタンス、低電圧で駆動する必要があります。
●ステッピングモーターの軸端との結合部を着脱する際は、軸端をハンマーなどで直接叩いたりしないでください。(ハンマーがシャフト端に直接当たり、ステッピングモーターシャフトの他端のエンコーダーが損傷する可能性があります)。
● 良好な同心性を確保するために、シャフトの端を最適な状態に揃えるようにしてください。そうしないと、振動が発生したり、ベアリングが損傷したり、シャフトが破損したりする可能性があります。
●水や油滴のかかる場所でも使用できますが、完全防水・耐油ではありません。デフォルトの保護レベルは IP54 です。したがって、モーターは水や油によって侵食される環境に設置したり使用したりしないでください (特別な保護レベルが必要な場合は、お問い合わせください!)。
● モーターが減速機に接続されている場合、ステッピング モーターを使用するときは、減速機がステッピング モーターに入るのを防ぐためにオイルでシールする必要があります。
●モーターケーブルを油や水に入れないでください。ケーブルに、特にケーブルの出口や接続部で、外部からの曲げ力や自重によるモーメントや垂直方向の重みがかからないように注意してください。
● モーターが動く場合、ケーブル (つまり、モーターに付属しているもの) を固定部分 (モーターの反対側) にしっかりと固定し、ケーブル ホルダーに追加のケーブルを取り付けて遅延させる必要があります。曲げ応力を最小限に抑えることができます。ケーブルエルボの半径はできるだけ大きくする必要があります
テクニックの仕様
アイテム | 仕様 |
ステップ角度 | 1.8。 |
ステップ角度精度 | ±5% (フルステップ、無負荷) |
抵抗精度 | ±10% |
インダクタンス精度 | ±20% |
温度上昇 | 80。C Max.(定格電流、2相オン) |
周囲温度 | -20。℃~+50 。℃ |
絶縁抵抗 | 100MΩ以上、500VDC |
絶縁耐力 | AC500V 1分間 |
シャフトのラジアル遊び | 0.02最大(450g荷重) |
シャフトの軸方向の遊び | 0.08最大(450g荷重) |
絶縁クラス | B |
シリーズ モデル | モーターの長さ 長さ(mm) | 定格電流 (A) | 位相抵抗 (Ω) | 相インダクタンス (mH) | 保持トルク (kg.cm) | リード線 (いいえ。) | ローター慣性 (g.cm2) | モーター重量 (g) |
28HB31F068B | 31 | 0.68 | 5.6 | 3.4 | 0.6 | 4 | 9 | 110 |
28HB31F095B | 31 | 0.95 | 2.8 | 2.3 | 0.6 | 4 | 9 | 110 |
28HB44F095B | 44 | 0.95 | 4.7 | 3.7 | 0.9 | 4 | 12 | 140 |
28HB44F068B | 44 | 0.68 | 6.8 | 4.9 | 0.95 | 4 | 12 | 140 |
28HB51F095B | 51 | 0.95 | 5.6 | 5.0 | 1.1 | 4 | 18 | 180 |
28HB51S095B | 51 | 0.95 | 4.6 | 1.8 | 0.9 | 4 | 18 | 180 |
図面

配線図: