|








| Średnica wału: | |
|---|---|
| Długość wału: | |
| Ilość: | |
Krótki opis
● Mały kąt kroku i wysoka precyzja;
● Liczba par biegunów równa jest liczbie zębów wirnika, którą można zmieniać w szerokim zakresie w zależności od potrzeb;
● Indukcyjność uzwojenia zmienia się nieznacznie wraz z położeniem wirnika, co pozwala łatwo uzyskać najlepszą kontrolę działania;
● Obwód magnetyczny magnesowania osiowego, wykorzystujący nowy materiał z magnesami trwałymi i produktem o wysokiej energii magnetycznej, sprzyja poprawie wydajności silnika;
● Magnesy wirnika zapewniają wzbudzenie;brak znaczących oscylacji w całym obszarze działania.
Zasady nazewnictwa
| 42 | HB | 40 | F | 105 | B | 06 |
| ① | ② | ③ | ④ | ⑤ | ⑥ | ⑦ |
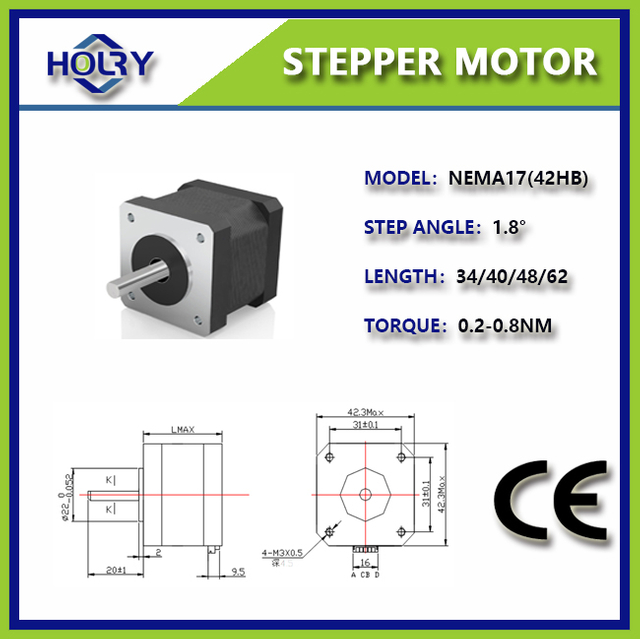
①: 42: Podstawa silnika: 42*42mm
②: HB: Hybrydowy silnik krokowy
③: 40: Długość korpusu silnika
④: F: Liczba przewodów: cztery przewody, S: sześć przewodów, E: 8 przewodów
⑤: 105: Wartość prądu znamionowego silnika 1,5A
⑥: B: Na wale silnika znajduje się płaski przewód, CL oznacza przekładnię D oznacza podwójny wał wyjściowy PJ oznacza wpust
⑦: 06: Numer pochodny
Opis silnika
● Silnik krokowy jest używany przy niskich prędkościach --- prędkość nie powinna przekraczać 1000 obr./min (6666PPS przy 0,9 stopnia), a najlepiej jest go używać w zakresie 1000-3000PPS (0,9 stopnia).Silnik ma wysoką wydajność roboczą i niski poziom hałasu;
● Najlepiej nie używać pełnego kroku silnika krokowego, ponieważ wibracje są duże w stanie pełnego kroku;
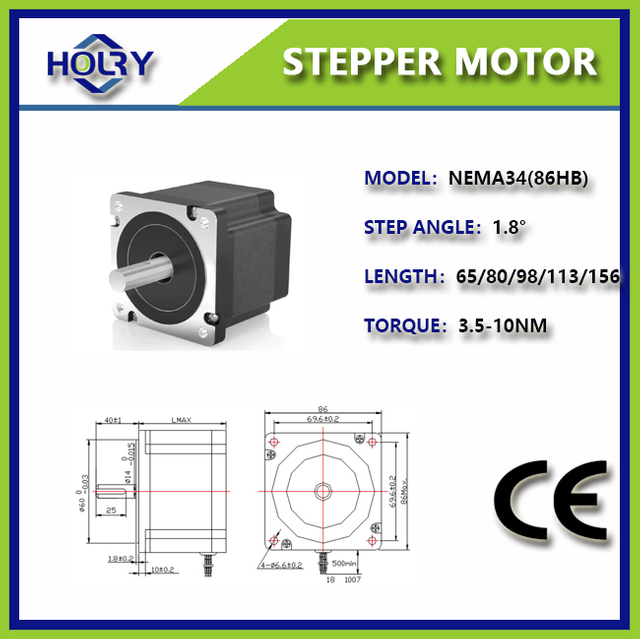
● Wartość napięcia podana w specyfikacji silnika nie jest wartością napięcia sterującego.Konkretne napięcie sterujące można wybrać w zależności od sterownika krokowego (zalecenie: silniki 42 i mniejsze wykorzystują napięcie 12–24 V, 57 silników używa prądu stałego 24–48 V, 86 używa prądu stałego 48–80 V, 110 silników przyjmuje napięcie wyższe niż 80 V prądu stałego)
● W przypadku obciążeń o dużym momencie bezwładności należy wybrać silnik o dużej wielkości;
● Gdy silnik pracuje pod dużą prędkością lub przy dużym obciążeniu bezwładnościowym, zazwyczaj nie uruchamia się z prędkością roboczą, ale stopniowo zwiększa częstotliwość i prędkość.Po pierwsze, silnik nie gubi kroków.Po drugie, może zmniejszyć hałas i poprawić dokładność pozycjonowania zatrzymania;
● W przypadku dużej precyzji należy to rozwiązać poprzez hamowanie mechaniczne, zwiększenie prędkości obrotowej silnika lub zastosowanie sterownika o dużym podziałce;
● Silnik nie powinien pracować w obszarze wibracji, jeśli to konieczne, można temu zaradzić zmieniając napięcie, prąd lub dodając tłumienie;
● Gdy silnik pracuje poniżej 600PPS (0,9 stopnia), powinien być napędzany małym prądem, dużą indukcyjnością i niskim napięciem.
● Podczas montażu/demontażu części sprzęgła z końcówką wału silnika krokowego nie uderzaj bezpośrednio młotkiem w końcówkę wału.(Młotek uderza bezpośrednio w koniec wału, a enkoder na drugim końcu wału silnika krokowego może zostać uszkodzony);
● Staraj się ustawić końce wałów w jak najlepszym stanie, aby zapewnić dobrą koncentryczność, w przeciwnym razie mogą wystąpić wibracje, uszkodzenie łożysk, a nawet pęknięcie wałów;
● Silnik może być używany w miejscach narażonych na działanie kropel wody lub oleju, ale nie jest w pełni wodoodporny ani olejoodporny.Domyślny poziom ochrony to IP54.Dlatego też silnika nie należy umieszczać ani używać w środowisku ulegającym erozji przez wodę lub olej (w razie potrzeby należy skontaktować się z nami w ramach specjalnego poziomu ochrony!);
● Jeśli silnik jest podłączony do przekładni redukcyjnej, w przypadku korzystania z silnika krokowego należy go uszczelnić olejem, aby zapobiec przedostawaniu się przekładni redukcyjnej do silnika krokowego;
● Nie zanurzaj kabla silnika w oleju ani wodzie.Upewnij się, że kabel nie jest poddawany momentowi lub ciężarowi pionowemu z powodu zewnętrznej siły zginającej lub własnego ciężaru, zwłaszcza na wylocie kabla lub połączeniu.
● W przypadku ruchu silnika kabel (czyli ten dołączony do silnika) należy solidnie przymocować do części nieruchomej (naprzeciw silnika) i opóźnić go dodatkowym kablem załadowanym w uchwycie kabla, tak, że naprężenie zginające Można je zminimalizować.Promień kolanka kabla powinien być jak największy
Specyfikacja techniki
Przedmiot | Dane techniczne |
Kąt kroku | 1.8。 |
Dokładność kąta kroku | ±5% (pełny stopień, bez obciążenia) |
Dokładność rezystancji | ±10% |
Dokładność indukcyjności | ±20% |
Wzrost temperatury | 80。C Maks. (prąd znamionowy, 2 fazy włączone) |
Temperatura otoczenia | -20。C~+50 。C |
Rezystancja izolacji | 100MΩMin.,500 V prądu stałego |
Wytrzymałość dielektryczna | 500VAC przez jedną minutę |
Luz promieniowy wału | 0,02 maks.(obciążenie 450 g) |
Luz osiowy wału | 0,08 maks.(obciążenie 450 g) |
Klasa izolacji | B |
Seria Model | Długość silnika L(mm) | Prąd znamionowy (A) | Rezystancja fazowa (Ω) | Indukcyjność fazowa (mH) | Trzymanie momentu obrotowego (Kg.cm) | Drut ołowiany (NIE.) | Bezwładność wirnika (g.cm²) | Masa silnika (G) |
28HB31F068B | 31 | 0.68 | 5.6 | 3.4 | 0.6 | 4 | 9 | 110 |
28HB31F095B | 31 | 0.95 | 2.8 | 2.3 | 0.6 | 4 | 9 | 110 |
28HB44F095B | 44 | 0.95 | 4.7 | 3.7 | 0.9 | 4 | 12 | 140 |
28HB44F068B | 44 | 0.68 | 6.8 | 4.9 | 0.95 | 4 | 12 | 140 |
28HB51F095B | 51 | 0.95 | 5.6 | 5.0 | 1.1 | 4 | 18 | 180 |
28HB51S095B | 51 | 0.95 | 4.6 | 1.8 | 0.9 | 4 | 18 | 180 |
Rysunki

Schemat połączeń: