|








Korte beschrijving
● Kleine staphoek en hoge precisie;
● Het aantal poolparen is gelijk aan het aantal rotortanden, dat naar behoefte binnen een groot bereik kan worden gewijzigd;
● De kronkelende inductantie verandert weinig met de rotorpositie, waardoor eenvoudig de beste werkingscontrole wordt bereikt;
● Het magnetische circuit voor axiale magnetisatie, waarbij gebruik wordt gemaakt van nieuw permanent magneetmateriaal met een hoog magnetisch energieproduct, is bevorderlijk voor de verbetering van de motorprestaties;
● Rotormagneten zorgen voor excitatie;geen noemenswaardige schommelingen over het gehele werkgebied.
Naamgevingsregels
| 42 | HB | 40 | F | 105 | B | 06 |
| ① | ② | ③ | ④ | ⑤ | ⑥ | ⑦ |
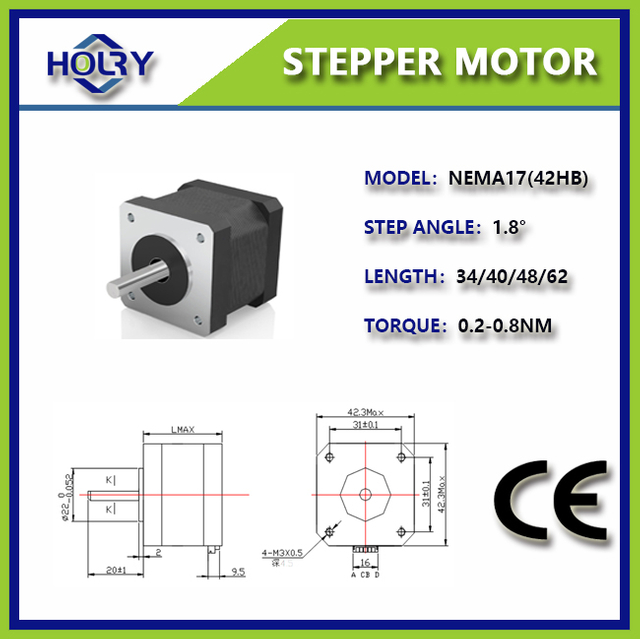
①: 42: Motorbasis: 42*42mm
②: HB: Hybride stappenmotor
③: 40: Lengte motorlichaam
④: F: Aantal kabels: vier draden, S: zes draden, E: 8 draden
⑤: 105: Nominale motorstroomwaarde 1,5A
⑥: B: Er zit een platte draad op de motoras, CL staat voor tandwiel D staat voor dubbele uitgaande as PJ staat voor spiebaan
⑦: 06: Afgeleid nummer
Motorbeschrijving
● Stappenmotor wordt gebruikt bij lage snelheden --- de snelheid mag niet hoger zijn dan 1000 tpm (6666 PPS bij 0,9 graden), en het is het beste om deze tussen 1000 en 3000 PPS (0,9 graden) te gebruiken.De motor heeft een hoge werkefficiëntie en een laag geluidsniveau;
● Het is het beste om de stappenmotor niet in de volledige stapstand te gebruiken, en de trillingen zijn groot in de volledige stapstand;
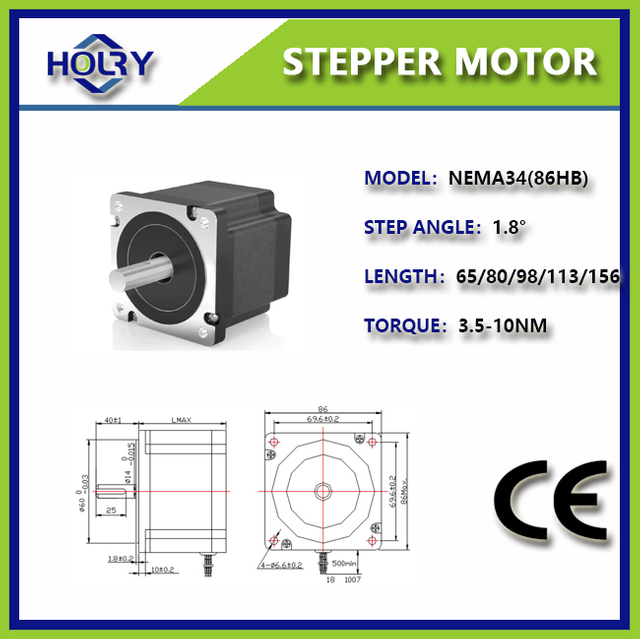
● De spanningswaarde van de motorspecificatie is niet de aandrijfspanningswaarde.De specifieke aandrijfspanning kan worden geselecteerd op basis van de stappenmotor (aanbeveling: 42 en lager motoren gebruiken 12-24V, 57 motoren gebruiken DC 24V-48V, 86 gebruiken DC 48-80V, 110 De motor gebruikt hoger dan DC 80V)
● Voor belastingen met een groot traagheidsmoment moet een motor met een groot frameformaat worden gekozen;
● Wanneer de motor onder hoge snelheid of een grote traagheidsbelasting staat, start hij doorgaans niet op de werksnelheid, maar verhoogt hij geleidelijk de frequentie en snelheid.Ten eerste verliest de motor geen stappen.Ten tweede kan het geluid verminderen en de positioneringsnauwkeurigheid bij het stoppen verbeteren;
● In het geval van hoge precisie moet dit worden opgelost door mechanische vertraging, het verhogen van de motorsnelheid of het gebruik van een driver met hoge onderverdeling;
● De motor mag niet werken in het trillingsgebied. Indien nodig kan dit worden opgelost door de spanning, stroom te veranderen of wat demping toe te voegen;
● Wanneer de motor onder 600PPS (0,9 graden) werkt, moet deze worden aangedreven door kleine stroom, grote inductie en lage spanning.
● Bij het installeren/verwijderen van het koppelingsdeel met het aseinde van de stappenmotor mag u niet rechtstreeks met een hamer op het aseinde slaan.(De hamer raakt rechtstreeks het asuiteinde en de encoder aan het andere uiteinde van de stappenmotoras kan beschadigd raken);
● Probeer de aseinden in de beste staat uit te lijnen om een goede concentriciteit te garanderen, anders kunnen er trillingen optreden, kunnen lagers beschadigd raken of kunnen zelfs assen breken;
● De motor kan worden gebruikt op plaatsen die worden aangetast door water- of oliedruppels, maar is niet volledig waterdicht of oliebestendig.Het standaard beschermingsniveau is IP54.Daarom mag de motor niet worden geplaatst of gebruikt in een omgeving die is geërodeerd door water of olie (indien nodig Speciaal beschermingsniveau, neem dan contact met ons op!);
● Als de motor is aangesloten op een reductiekast, moet deze bij gebruik van een stappenmotor worden afgedicht met olie om te voorkomen dat de reductiekast in de stappenmotor terechtkomt;
● Dompel de motorkabel niet onder in olie of water.Zorg ervoor dat de kabel niet wordt blootgesteld aan moment- of verticale belasting als gevolg van externe buigkracht of zijn eigen gewicht, vooral bij de kabeluitgang of -aansluiting.
● In geval van beweging van de motor moet de kabel (dat wil zeggen degene die bij de motor wordt geleverd) stevig worden vastgemaakt aan een stationair onderdeel (tegenover de motor) en moet deze worden vertraagd door een extra kabel in de kabelhouder te plaatsen, zodat de buigspanning kan worden geminimaliseerd.De straal van de kabelbocht moet zo groot mogelijk zijn
Techniekspecificatie
Item | Specificaties |
Stap Hoek | 1.8。 |
Nauwkeurigheid staphoek | ±5% (volledige stap, geen belasting) |
Weerstandsnauwkeurigheid | ±10% |
Nauwkeurigheid van de inductie | ±20% |
Temperatuurstijging | 80。C Max. (nominale stroom, 2 fasen aan) |
Omgevingstemperatuur | -20。C~+50 。C |
Isolatieweerstand | 100MΩMin.,500 VDC |
Diëlektrische sterkte | 500 VAC gedurende één minuut |
Radiale speling van de as | 0,02Max.(450 g-belasting) |
Axiale speling op de as | 0,08Max.(450 g-belasting) |
Isolatieklasse | B |
Serie Model | Motorlengte L(mm) | Nominale stroom (A) | Fase weerstand (Ω) | Fase-inductie (mH) | Houdkoppel (Kg.cm) | Looddraad (NEE.) | Rotortraagheid (g.cm²) | Motorgewicht (G) |
28HB31F068B | 31 | 0.68 | 5.6 | 3.4 | 0.6 | 4 | 9 | 110 |
28HB31F095B | 31 | 0.95 | 2.8 | 2.3 | 0.6 | 4 | 9 | 110 |
28HB44F095B | 44 | 0.95 | 4.7 | 3.7 | 0.9 | 4 | 12 | 140 |
28HB44F068B | 44 | 0.68 | 6.8 | 4.9 | 0.95 | 4 | 12 | 140 |
28HB51F095B | 51 | 0.95 | 5.6 | 5.0 | 1.1 | 4 | 18 | 180 |
28HB51S095B | 51 | 0.95 | 4.6 | 1.8 | 0.9 | 4 | 18 | 180 |
tekeningen

Schakelschema: