General technical characteristics
● Stepper motor is used in low-speed occasions---the speed should not exceed 1000 rpm, (6666PPS at 0.9 degrees), and it is best to use it between 1000-3000PPS (0.9 degrees). The motor has high working efficiency and low noise;
● It is best not to use the full-step state of the stepper motor, and the vibration is large in the full-step state;
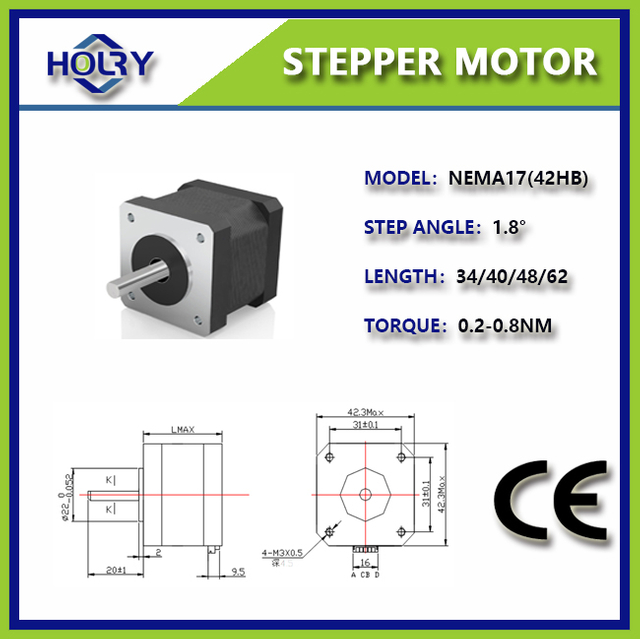
● The voltage value of the motor specification is not the driving voltage value. The specific driving voltage can be selected according to the stepper driver (recommendation: 42 and below motors use 12-24V, 57 motors use DC 24V-48V, 86 use DC 48-80V, 110 The motor adopts higher than DC 80V)
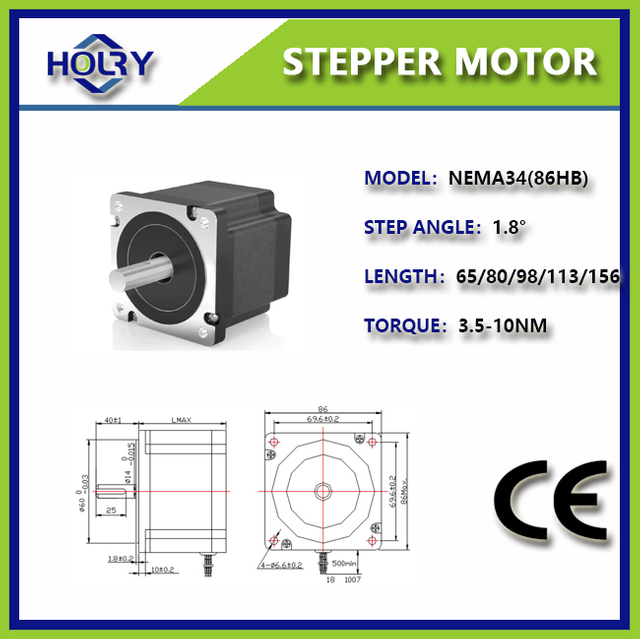
● For loads with large moment of inertia, a large frame size motor should be selected;
● When the motor is under high speed or large inertia load, it generally does not start at the working speed, but gradually increases the frequency and speed. First, the motor does not lose steps. Second, it can reduce noise and improve the positioning accuracy of stopping;
● In case of high precision, it should be solved by mechanical deceleration, increasing the motor speed, or using a driver with high subdivision;
● The motor should not work in the vibration area, if necessary, it can be solved by changing the voltage, current or adding some damping;
● When the motor works below 600PPS (0.9 degree), it should be driven by small current, large inductance and low voltage.
Mechanical technical characteristics
● When installing/removing the coupling part with the stepper motor shaft end, do not hit the shaft end with a hammer directly. (The hammer directly hits the shaft end, and the encoder on the other end of the stepper motor shaft may be damaged);
● Try to align the shaft ends to the best state to ensure good concentricity, otherwise vibration may occur, bearings may be damaged, or even shafts may be broken;
● The motor can be used in places that will be attacked by water or oil droplets, but it is not fully waterproof or oil-proof. The default protection level is IP54. Therefore, the motor should not be placed or used in an environment eroded by water or oil (if necessary Special protection level, please contact us!);
● If the motor is connected to a reduction gear, it should be sealed with oil when using a stepper motor to prevent the reduction gear from entering the stepper motor;
● Do not immerse the motor cable in oil or water. Make sure that the cable is not subjected to moment or vertical weight due to external bending force or its own weight, especially at the cable outlet or connection.
● In the case of motor movement, the cable (that is, the one that comes with the motor) should be securely fastened to a stationary part (opposite the motor) and it should be delayed with an additional cable loaded in the cable holder, so that bending stress It can be minimized. The radius of the cable elbow should be as large as possible
 Русский
Русский English
English العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు