|








| Diametro albero: | |
|---|---|
| Lunghezza albero: | |
| Quantità: | |
Breve descrizione
● Piccolo angolo di passo e alta precisione;
● Il numero di coppie polari è pari al numero di denti del rotore, che può essere variato in un'ampia gamma a seconda delle esigenze;
● L'induttanza dell'avvolgimento cambia poco con la posizione del rotore, il che consente di ottenere facilmente il miglior controllo operativo;
● Il circuito magnetico di magnetizzazione assiale, che utilizza un nuovo materiale a magnete permanente con un prodotto ad alta energia magnetica, favorisce il miglioramento delle prestazioni del motore;
● I magneti del rotore forniscono l'eccitazione;nessuna oscillazione significativa su tutta l’area operativa.
Regole di denominazione
| 42 | HB | 40 | F | 105 | B | 06 |
| ① | ② | ③ | ④ | ⑤ | ⑥ | ⑦ |
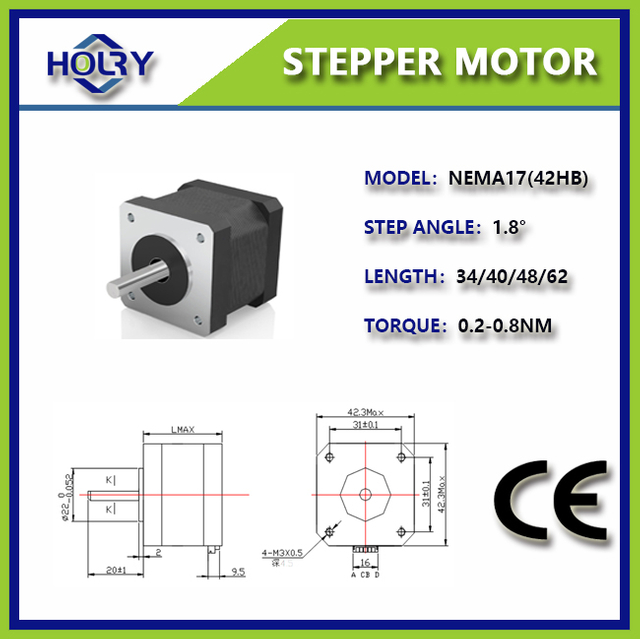
①: 42: Base motore: 42*42 mm
②: HB: motore passo-passo ibrido
③: 40: Lunghezza del corpo motore
④: F: Numero di cavi: quattro fili, S: sei fili, E: 8 fili
⑤: 105: Valore corrente nominale del motore 1,5 A
⑥: B: Sull'albero motore è presente un filo piatto, CL sta per ingranaggio D sta per albero di uscita doppio PJ sta per chiavetta
⑦: 06: Numero derivato
Descrizione del motore
● Il motore passo-passo viene utilizzato in occasioni a bassa velocità: la velocità non deve superare 1.000 giri/min (6.666 PPS a 0,9 gradi) ed è meglio utilizzarlo tra 1.000 e 3.000 PPS (0,9 gradi).Il motore ha un'elevata efficienza lavorativa e un basso rumore;
● È meglio non utilizzare lo stato di passo intero del motore passo-passo e la vibrazione è elevata nello stato di passo intero;
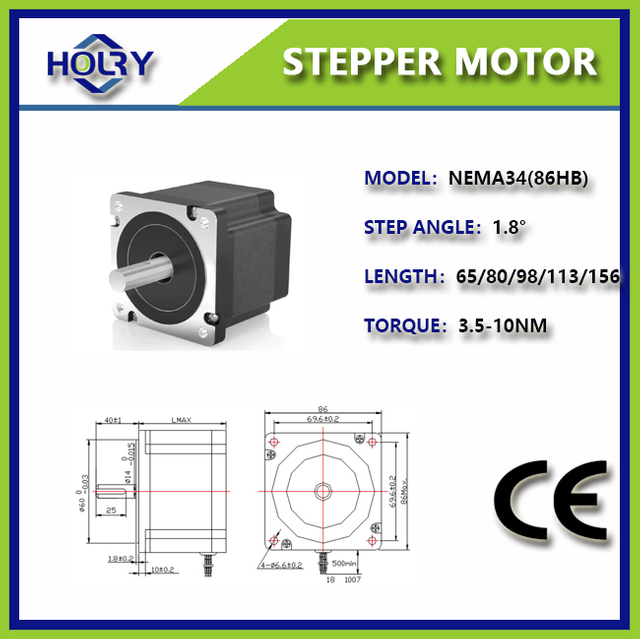
● Il valore della tensione delle specifiche del motore non è il valore della tensione di pilotaggio.La tensione di pilotaggio specifica può essere selezionata in base al driver passo-passo (raccomandazione: 42 motori e inferiori utilizzano 12-24 V, 57 motori utilizzano CC 24 V-48 V, 86 utilizzano CC 48-80 V, 110 Il motore adotta CC superiore a 80 V)
● Per carichi con momento d'inerzia elevato, è necessario selezionare un motore di grande dimensione;
● Quando il motore è sottoposto ad alta velocità o ad un carico di inerzia elevato, generalmente non si avvia alla velocità di lavoro, ma aumenta gradualmente la frequenza e la velocità.Innanzitutto il motore non perde passi.In secondo luogo, può ridurre il rumore e migliorare la precisione di posizionamento dell'arresto;
● In caso di elevata precisione, il problema dovrebbe essere risolto mediante decelerazione meccanica, aumentando la velocità del motore o utilizzando un driver con elevata suddivisione;
● Il motore non dovrebbe funzionare nell'area delle vibrazioni, se necessario, il problema può essere risolto modificando la tensione, la corrente o aggiungendo un po' di smorzamento;
● Quando il motore funziona al di sotto di 600 PPS (0,9 gradi), deve essere azionato da corrente ridotta, grande induttanza e bassa tensione.
● Quando si installa/rimuove la parte del giunto con l'estremità dell'albero del motore passo-passo, non colpire direttamente l'estremità dell'albero con un martello.(Il martello colpisce direttamente l'estremità dell'albero e l'encoder sull'altra estremità dell'albero del motore passo-passo potrebbe danneggiarsi);
● Cercare di allineare le estremità dell'albero nello stato migliore per garantire una buona concentricità, altrimenti potrebbero verificarsi vibrazioni, i cuscinetti potrebbero essere danneggiati o addirittura gli alberi potrebbero rompersi;
● Il motore può essere utilizzato in luoghi soggetti all'attacco di gocce d'acqua o d'olio, ma non è completamente impermeabile o resistente all'olio.Il livello di protezione predefinito è IP54.Pertanto, il motore non deve essere posizionato o utilizzato in un ambiente eroso da acqua o olio (se necessario Livello di protezione speciale, contattateci!);
● Se il motore è collegato a un riduttore, deve essere sigillato con olio quando si utilizza un motore passo-passo per evitare che il riduttore entri nel motore passo-passo;
● Non immergere il cavo del motore in olio o acqua.Assicurarsi che il cavo non sia soggetto a momenti o pesi verticali dovuti a forze di flessione esterne o al proprio peso, soprattutto in corrispondenza dell'uscita o del collegamento del cavo.
● In caso di movimento del motore, il cavo (cioè quello fornito con il motore) deve essere fissato saldamente a una parte fissa (di fronte al motore) e deve essere ritardato con un cavo aggiuntivo caricato nel portacavo, in modo che lo stress da flessione possa essere ridotto al minimo.Il raggio del gomito del cavo dovrebbe essere il più ampio possibile
Specifica tecnica
Articolo | Specifiche |
Angolo di passo | 1.8。 |
Precisione dell'angolo di passo | ±5% (passo completo, senza carico) |
Precisione della resistenza | ±10% |
Precisione dell'induttanza | ±20% |
Aumento della temperatura | 80。C Max. (corrente nominale, 2 fasi attive) |
Temperatura ambiente | -20。C~+50 。C |
Resistenza di isolamento | 100 MΩMin.,500 VCC |
Rigidità dielettrica | 500 V CA per un minuto |
Gioco radiale dell'albero | 0,02Max.(450 g di carico) |
Gioco assiale dell'albero | 0,08Max.(450 g di carico) |
Classe di isolamento | B |
Serie Modello | Lunghezza del motore L(mm) | Corrente nominale (UN) | Resistenza di fase (Ω) | Induttanza di fase (mH) | Coppia di mantenimento (Kg.cm) | Cavo principale (NO.) | Inerzia del rotore (g.cm²) | Peso del motore (G) |
28HB31F068B | 31 | 0.68 | 5.6 | 3.4 | 0.6 | 4 | 9 | 110 |
28HB31F095B | 31 | 0.95 | 2.8 | 2.3 | 0.6 | 4 | 9 | 110 |
28HB44F095B | 44 | 0.95 | 4.7 | 3.7 | 0.9 | 4 | 12 | 140 |
28HB44F068B | 44 | 0.68 | 6.8 | 4.9 | 0.95 | 4 | 12 | 140 |
28HB51F095B | 51 | 0.95 | 5.6 | 5.0 | 1.1 | 4 | 18 | 180 |
28HB51S095B | 51 | 0.95 | 4.6 | 1.8 | 0.9 | 4 | 18 | 180 |
Disegni

Schema elettrico: