-
P Mba'éichapa ikatu amohenda umi mba'e ojejapóva jepi umi motor paso a paso rehe.
Peteî
cheque conexiones sueltas, overifica compatibilidad fuente de alimentación, oasegura cableado ha polaridad hekoitépe, ha oinspecciona obstrucciones mecánicas. Opytáramo apañuãi, ehesa’ỹijo controlador ñemboheko, ha ehecha eñeha’ã peteĩ controlador térã controlador iñambuéva ndive emo’ã hag̃ua pe mba’e’oka.
-
P Mba épa umi aplicación común umi motor paso a paso rehegua.
Peteĩ
motor paso a paso ojuhu aplicación opaichagua ámbito-pe, umíva apytépe robótica, impresión 3D, máquina CNC, dispositivo médico ha sistema de automatización. Habilidad orekóva ome’ẽ haĝua control preciso ojapo chuguikuéra adecuado umi tembiapo oikotevẽva posicionamiento hendaitépe.
-
P Mba éichapa ikatu acontrola petet motor paso a paso.
Peteĩ
motor paso a paso ikatu oñecontrola ojeporúvo umi controlador dedicado motor paso a paso, microcontrolador térã ICS especializado motor paso a paso. Umi método de control popular oime paso completo, media paso ha microestepping, cada uno oinfluíva rendimiento ha resolución motor.
-
P Mba épa ojoavy umi motor paso a paso bipolar ha unipolar apytépe.
A
Pe diferencia principal oime configuración de bobinado-pe. Umi motor bipolar oguereko mokõi bobina por fase, ha corriente osyry mokõive dirección-pe, umi motor unipolar katu oguereko peteĩ devanado aprovechado central, ha corriente osyry peteĩ dirección-pe. Umi motor bipolar generalmente oikuave’ẽ par yvateve.
-
P Ikatúpa amboguata peteĩ motor paso a paso peteĩ chofer dedicado’ỹre?
Peteĩ
aja ikatu oñemboguata peteĩ motor paso a paso directamente peteĩ microcontrolador-gui, ojeporúvo peteĩ conductor de dedicado motor paso a paso oñerrekomenda ojejapo porãve hag̃ua ha oñeñangareko hag̃ua sobrecorriente ha sobrecalentamiento rehe. Umi conductor motor paso a paso ome'ë control de corriente oñeikotevëva ha formación forma de onda operación óptima motor.
-
P Mba épa ojoavy umi motor paso a paso bipolar ha unipolar apytépe.
A
Pe diferencia principal oime configuración de bobinado-pe. Umi motor bipolar oguereko mokõi bobina por fase, ha umi motor unipolar katu oguereko peteĩ devanado aprovechado mbytépe. Umi motor bipolar generalmente ome e par yvateve, ha katu umi motor unipolar ndahasýi ojecontrola hagua.
-
P Mba'éichapa ikatu amohenda umi mba'e ojejapóva jepi umi motor paso a paso rehe.
Peteî
cheque conexiones sueltas, overifica compatibilidad fuente de alimentación, oinspecciona cableado polaridad correcta, ha oasegura ndaipóriha obstrucciones mecánicas. Ojehechávo controlador ñemboheko ha jesareko peteĩ controlador térã controlador alternativo ndive ikatu oipytyvõ ojekuaa ha oñemyatyrõ hag̃ua umi mbaꞌe.
-
q Umi motor paso a paso oikotevẽpa retroalimentación control de posición rehegua?
Peteĩ
aja umi motor paso a paso ikatu ombaꞌapo peteĩ sistema de bucle abierto-pe retroalimentación ÿre, umi sistema de bucle cerrado orekóva umi dispositivo de retroalimentación haꞌeháicha umi codificador térã sensor ojeporu umi aplicación-pe, iñimportantehápe control de posición precisa ha corrección de errores.
-
P Mba épa pe microestepping, ha mba éichapa omoporãve pe rendimiento motor paso a paso.
Peteĩ
microestepación ha'e peteĩ técnica omboja'óva peteĩteĩ paso completo peteĩ motor paso a paso-gui umi sub-paso michĩvévape. Péicha ikatu ojejapo movimiento suaveve, oñemboguejy vibración ha oñemehora precisión posicionamiento rehegua, especialmente velocidad michĩvape.
-
P Mba épa pe significado oguerekóva ángulo de paso umi motor paso a paso rehegua.
Pete
ángulo paso rehegua ha e pe ángulo rupive pe motor ojerepa petettet pulso de entrada rehe. Ha e petet parámetro crítico odetermináva motor resolución ha exactitud. Umi ángulo paso michĩvéva oreko resultado control iporãvéva ha katu ikatu oikotevẽ electrónica de accionamiento complejo-ve.
-
P Mba épa umi componente clave petet sistema motor paso a paso rehegua.
A
sistema motor paso a paso oguereko motor paso a paso, petet conductor ocontrola hagua motor, ha petet controlador téra microcontrolador omoheñóiva secuencia de pulsos omboguata hagua motor.
-
P Mba épa petet motor paso a paso, ha mba éichapa ojoavy ambue tipo de motorgui.
A
Motor paso a paso ha e petet dispositivo electromecánico omoambuéva umi pulso eléctrico umi movimiento mecánico precisope. Ndojoguái ambue motor-kuérape, omýi umi paso discreto-pe, opermitíva control exacto posición ha velocidad rehe.
-
Q ¿ Ikatu piko umi motor paso a paso omba’apo peteĩ configuración de bucle abierto-pe?
A
Heẽ, umi motor paso a paso ikatu omba’apo peteĩ sistema de bucle abierto-pe, ojehupytyhápe control de posición umi dispositivo de retroalimentación externa’ỹre. Ha katu, umi aplicación crítica-pe g̃uarã, umi sistema de bucle cerrado orekóva retroalimentación ikatu ojepreferi omombarete hag̃ua exactitud ha umi error hekopete.
-
P Mba'épa pe microestemping, ha mba'érepa iñimportante?
Microemplimación
ha'e peteĩ técnica omboja'óva peteĩteĩ paso completo peteĩ motor paso a paso rehegua incremento michĩvévape. Kóva ome’ẽ movimiento suavevéva, omboguejy vibración ha omoporãve exactitud. Microestepping ha'e esencial umi aplicación ojeruréva precisión.
-
P Mba éichapa ojedetermina pe resolución paso rehegua petet motor paso a paso rehegua.
PETEĨ
Resolución de paso ha e pe ángulo michtvéva pe motor ikatu omýi ombohováivo petet pulso entrada rehegua añoite. Ojekuaa pe motor ñemopu'ã, mboy postepa ha umi electrónica de impulsión. Umi conteo de polo yvateve ha microestepping ikatu omombarete resolución.
Ojekalkula hagua resolución paso rehegua, ikatu ojeporu ko a fórmula:
-
P Mba épa umi mba e porã oguerekóva ojeporúvo umi motor paso a paso.
Peteĩ
motor paso a paso oikuave’ẽ control preciso movimiento rehegua, par yvate velocidad michĩvape, sencillez de control ha operación de bucle abierto (noñeikotevẽi retroalimentación). Ha'ekuéra iporãiterei umi aplicación oikotevëva control de posición exacto.
-
P Mba épa petet motor paso a paso, ha mba éichapa omba apo.
PETEĨ
Ko'ápe oî peteî desglose mba'éichapa omba'apo peteî motor paso a paso :
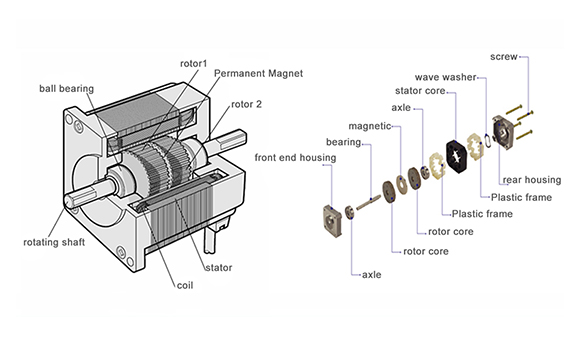
Mopu'ã:
Peteĩ motor paso a paso típico oguereko peteĩ rotor ha peteĩ estator. Pe rotor ha e pe parte ojeréva, pe estator katu ha e pe parte estacionaria. Pe rotor oguereko jepi diente térã estructura magnética ointeractuáva umi campo magnético omoheñóiva estator.
Estator ha bobinado: .
Pe estator oguereko bobinas de herida de alambre umi poste jerére. Ko a bobina oñeenergiza secuencialmente ojejapo hagua petet campo magnético ojeréva. Pe número de polos ha devanados motor rehegua odetermina iángulo de paso, ha e pe ángulo rupive pe motor ojere petet pulso de entrada rehe.
Interacción magnética rehegua: .
Ojejapo jave petet corriente eléctrica petet bobina rehe pe estatorpe, omoheñói petet campo magnético. Pe rotor, ojejapóva jepi peteĩ imán permanente térã peteĩ material ferromagnético-gui, oñembojoaju pe campo magnético omoheñóiva pe bobina estator energizado rupive. Péva ojapo pe rotor oho hagua petet posición específicape.
Rotación de paso rehegua: .
Umi motor paso a paso oñemomýi umi paso discretope, ha pe ángulo de rotación petettet paso rehegua ojedetermina pe motor diseño rupive. Pe secuencia de energizar umi bobina estator rehegua odicta pe dirección ha distancia oguerekóva cada paso. Ojecontrolávo secuencia ko'ã pulso, ojehupyty control preciso posición ha velocidad motor rehe.
Señales de control rehegua: .
Ojejapo hagua petet motor paso a paso, petet controlador téra microcontrolador omondo petet serie de pulsos eléctricos umi devanado estator motor rehegua. Pe orden ha tiempo ko a pulso rehegua odetermina mba e dirección ha velocidad oguerekóva pe motor. Ko método de control oheja oñemohenda porã haguã oñeikotevẽ'ỹre umi sensor externo.
Paso completo ha microestepación: .
Umi motor paso a paso ikatu omba apo modo de paso completo-pe, upépe petettet pulso ojoaju petet paso rehe. Ojejapokuaa avei, microestapular osubdivisa petettet paso incremento michtvévape, ome e movimiento isãsovéva ha resolución iporãvéva. Microestemping ojehupyty oñecontrola rupi pe corriente oíva umi bobina motor rehegua precisamente.
-
P Mba épa pe razón principal ojepuru hagua petet motor paso a paso.
A
esencialmente, umi motor paso a paso ome e control de velocidad iporãitereíva, posicionamiento preciso ha repetibilidad movimiento rehegua. Avei, umi motor paso a paso ojeroviaiterei ndaipórigui cepillo de contacto motor-pe. Péicha oñemboguejy falla mecánica ha omomba'e guasu motor rekove. Hi’arive, umi motor paso a paso ojehepyme’ẽve ambue motor-gui ha oreko hetaiterei aplicación.
-
P Mba'érepa iñimportante umi motor paso a paso?
Peteĩ
motor paso a paso ikatu oproduci par henyhẽva, instantáneo - jepe peteĩ parada guive. Kóva ojapo chuguikuéra ideprovechoitereíva umi aplicación control de movimiento-pe g̃uarã, oĩháme exactitud, repetibilidad ha potencia primordial.
-
P Mba'épa pe motor paso a paso ñemyesakã.
Peteî
motor paso a paso ha'e umi motor DC omýiva umi paso discreto-pe. Oguereko hikuái heta bobina oñemohendava aty hérava 'fase'. Omombarete rupi petet fase secuenciape, pe motor ojere va era, petet paso a la vez. Peteĩ paso controlado computadora rupive ikatu rehupyty posicionamiento precisoiterei ha/térã control de velocidad.
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు