-
K Hogyan lehet elhárítani a szokásos problémákat a léptetőmotorokkal?
Ellenőrizze
a laza csatlakozásokat, ellenőrizze a tápegység kompatibilitását, biztosítsa a megfelelő vezetékeket és polaritást, és ellenőrizze a mechanikai akadályokat. Ha a problémák továbbra is fennállnak, vizsgálja felül a vezérlő beállításait, és fontolja meg a tesztelést egy másik illesztőprogrammal vagy vezérlővel a probléma elkülönítése érdekében.
-
K Melyek a léptetőmotorok általános alkalmazásai?
A
léptetőmotorok alkalmazásokat találnak különféle területeken, beleértve a robotikát, a 3D -s nyomtatást, a CNC gépeket, az orvostechnikai eszközöket és az automatizálási rendszereket. A pontos vezérlés biztosításának képessége alkalmassá teszi őket a pontos pozicionálást igénylő feladatokhoz.
-
K Hogyan tudom irányítani egy léptetőmotort?
A
léptetőmotorokat dedikált léptetőmotor -vezérlők, mikrovezérlők vagy speciális léptetőmotor -IC -k segítségével lehet vezérelni. A népszerű vezérlési módszerek közé tartozik a teljes lépcső, a féllépés és a mikrosztepping, mindegyik befolyásolja a motor teljesítményét és felbontását.
-
K Mi a különbség a bipoláris és az unipoláris léptetőmotorok között?
A
fő különbség a kanyargós konfigurációban rejlik. A bipoláris motoroknak fázisonként két tekercse van, és az áram mindkét irányban áramlik, míg az unipoláris motorok középső csapdába esnek, és az áram egy irányban áramlik. A bipoláris motorok általában nagyobb nyomatékot kínálnak.
-
K Futtathatok egy léptetőmotort dedikált meghajtó nélkül?
Egy
ideig lehet egy léptetőmotort közvetlenül a mikrovezérlőből futtatni, ajánlott egy dedikált léptetőmotor -hajtóerővel, hogy jobb teljesítményt és védelmet nyújtson a túláram és a túlmelegedés ellen. A léptetőmotor -illesztőprogramok biztosítják a szükséges áramszabályozást és a hullámforma kialakítását az optimális motor működéséhez.
-
K Mi a különbség a bipoláris és az unipoláris léptetőmotorok között?
A
fő különbség a kanyargós konfigurációban rejlik. A bipoláris motoroknak fázisonként két tekercse van, míg az unipoláris motorok középpontjában álltak. A bipoláris motorok általában nagyobb nyomatékot biztosítanak, de az egypólusú motorokat könnyebben ellenőrizni.
-
K Hogyan lehet elhárítani a szokásos problémákat a léptetőmotorokkal?
Ellenőrizze
a laza csatlakozásokat, ellenőrizze a tápegység kompatibilitását, ellenőrizze a huzalozás helyes polaritást, és ellenőrizze, hogy nincs -e mechanikai akadály. A vezérlő beállításainak áttekintése és egy alternatív vezérlővel vagy illesztőprogrammal történő tesztelés segíthet a problémák azonosításában és megoldásában.
-
K A léptetőmotorok visszajelzést igényelnek -e a pozícióvezérléshez?
Egy
ideig a léptetőmotorok nyitott hurokrendszerben működhetnek visszacsatolás nélkül, zárt hurkú rendszerek, amelyek visszacsatoló eszközökkel, például kódolókkal vagy érzékelőkkel használják azokat az alkalmazásokban, ahol a pontos helyzetvezérlés és a hibajavítás elengedhetetlen.
-
K Mi az a mikrostepping, és hogyan javítja a léptetőmotor teljesítményét?
A
mikrostepping egy olyan technika, amely a léptetőmotor minden egyes lépését kisebb aljzatokra osztja. Ez lehetővé teszi a simább mozgást, a rezgéscsökkentést és a jobb helymeghatározási pontosságot, különösen alacsony sebességnél.
-
K Mi a jelentősége a lépcsőzetes motorokban?
Egy
lépésszög az a szög, amelyen keresztül a motor forog minden bemeneti impulzusra. Ez egy kritikus paraméter, amely meghatározza a motor felbontását és pontosságát. A kisebb lépésszögek finomabb vezérlést eredményeznek, de összetettebb meghajtó elektronikát igényelhetnek.
-
K Melyek a léptetőmotoros rendszer legfontosabb elemei?
A
léptetőmotoros rendszer maga a léptetőmotorból, a motor vezérlőjéből áll, és egy vezérlő vagy mikrovezérlő, amely az impulzusok sorozatát generálja a motor vezetéséhez.
-
K Mi az a léptetőmotor, és hogyan különbözik a más típusú motoroktól?
A
léptetőmotor egy elektromechanikus eszköz, amely az elektromos impulzusokat pontos mechanikai mozgáská alakítja. Más motorokkal ellentétben diszkrét lépésekben mozog, lehetővé téve a helyzet és a sebesség pontos ellenőrzését.
-
Q Működhet-e a léptetőmotorok nyitott hurok-konfigurációban?
Igen
, a léptetőmotorok nyitott hurokrendszerben működhetnek, ahol a helyzetvezérlés külső visszacsatoló eszközök nélkül érhető el. A kritikus alkalmazások esetében azonban a visszacsatolással rendelkező zárt hurkú rendszereket előnyben részesíthetik a pontosság javítása és a hibák kijavítása érdekében.
-
K Mi a mikrostepping, és miért fontos?
A
mikrostepping egy olyan technika, amely a léptetőmotor minden egyes lépését kisebb lépésekre osztja. Ez simább mozgást biztosít, csökkenti a rezgést és javítja a pontosságot. A mikrostepping elengedhetetlen a pontosságot igénylő alkalmazásokhoz.
-
K Hogyan határozzák meg a léptetőmotor lépés felbontását?
A
A lépés felbontása a legkisebb szög, amelyet a motor egyetlen bemeneti impulzusra reagálhat. Ezt a motor felépítése, a pólusok száma és a meghajtó elektronika határozza meg. A magasabb pólusszám és a mikrostepping javíthatja a felbontást.
A lépés felbontás kiszámításához a következő képletet használhatja:
-
K Melyek a Stepper Motors használatának előnyei?
A
léptetőmotorok a mozgás pontos irányítását, a nagy nyomatékot alacsony sebességgel, a vezérlés egyszerűségét és a nyitott hurok működését kínálják (nincs szükség visszajelzésre). Ideálisak a pontos helyzetszabályozáshoz szükséges alkalmazásokhoz.
-
K Mi az a léptetőmotor, és hogyan működik?
A
Itt van egy bontás arról, hogyan működik egy léptetőmotor :
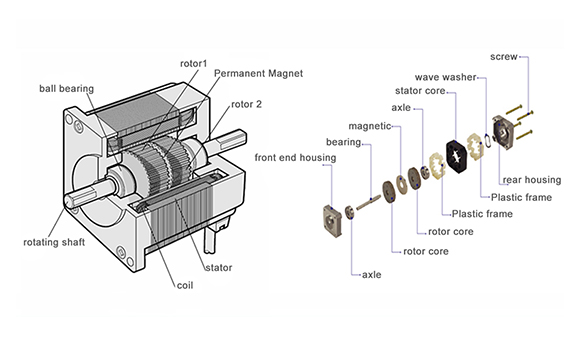
Építés:
Egy tipikus léptetőmotor rotorot és állórort tartalmaz. A forgórész a forgó rész, míg az állórész a helyhez kötött rész. A forgórész általában fogakkal vagy mágneses szerkezetgel van felszerelve, amely kölcsönhatásba lép az állórész által generált mágneses mezőkkel.
Állórész és tekercsek:
Az állórész az oszlopok körül huzalos tekercseket tartalmaz. Ezeket a tekercseket szekvenciálisan energiájú energiájúak, hogy forgó mágneses mezőt hozzanak létre. A motoros oszlopok és tekercsek száma meghatározza annak lépési szögét, azaz az a szög, amelyen keresztül a motor forog az egyes bemeneti impulzusokhoz.
Mágneses interakció:
Ha elektromos áramot alkalmaznak egy tekercsre az állórészben, mágneses mezőt generál. A rotor, amelyet általában állandó mágnesből vagy ferromágneses anyagból készítenek, összhangban áll az energiával rendelkező állórész tekercs által létrehozott mágneses mezővel. Ez miatt a forgórész egy meghatározott helyzetbe kerül.
Lépés forgása:
A léptetőmotorok diszkrét lépésekben mozognak, és az egyes lépések forgási szögét a motor kialakítása határozza meg. Az állórész tekercseinek energiájának sorrendje diktálja az egyes lépések irányát és távolságát. Ezen impulzusok szekvenciájának szabályozásával a motor helyzetének és sebességének pontos szabályozását elérik.
Vezérlőjelek:
A léptetőmotor működtetéséhez egy vezérlő vagy mikrovezérlő elektromos impulzusok sorozatát küldi a motor állórész -tekercseire. Ezen impulzusok rendezése és időzítése meghatározza a motor irányát és sebességét. Ez a vezérlési módszer lehetővé teszi a pontos pozicionálást külső érzékelők nélkül.
Teljes lépés és mikrostepping:
A léptetőmotorok teljes lépésben működhetnek, ahol minden impulzus egyetlen lépésnek felel meg. Alternatív megoldásként a mikrostepping minden egyes lépést kisebb lépésekre osztja, simább mozgást és finomabb felbontást biztosítva. A mikrosteppálást úgy érik el, hogy a motor tekercseiben pontosabban vezéreljük az áramot.
-
K Mi a fő oka a léptetőmotor használatának?
Alapvetően
a léptetőmotorok kiváló sebességszabályozást, pontos pozicionálást és mozgás megismételhetőségét biztosítják. Ezenkívül a léptetőmotorok nagyon megbízhatóak, mivel a motorban nincsenek érintkezőkefék. Ez minimalizálja a mechanikai meghibásodást és maximalizálja a motor élettartamát. Sőt, a léptetőmotorok olcsóbbak, mint más motorok, és széles körű alkalmazással rendelkeznek.
-
K Miért fontosak a léptetőmotorok?
A
léptetőmotorok teljes, pillanatnyi nyomatékot eredményezhetnek - még egy állástól is. Ez nagyon hasznossá teszi őket a mozgásvezérlő alkalmazásokhoz, ahol a pontosság, az ismétlődés és az energia kiemelkedően fontos.
-
K Mi a Stepper Motor magyarázata?
A
léptetőmotorok DC motorok, amelyek diszkrét lépésekben mozognak. Több tekercsük van, amelyeket 'fázisok ' -nek nevezett csoportokban szerveznek. Az egyes fázisok sorrendben történő energiájával a motor forog, egyenként egy lépéssel. A számítógéppel vezérelt lépcsőn nagyon pontos pozicionálást és/vagy sebességszabályozást érhet el.
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు