-
P ¿ Cómo soluciono problemas de problemas comunes con motores paso a paso?
Una
verificación de conexiones sueltas, verificar la compatibilidad de la fuente de alimentación, garantizar el cableado y la polaridad adecuados, e inspeccionar las obstrucciones mecánicas. Si los problemas persisten, revise la configuración del controlador y considere probar con un controlador o controlador diferente para aislar el problema.
-
P ¿ Cuáles son las aplicaciones comunes de los motores paso a paso?
Un
paso a paso de paso a paso encuentran aplicaciones en varios campos, incluyendo robótica, impresión 3D, máquinas CNC, dispositivos médicos y sistemas de automatización. Su capacidad para proporcionar un control preciso los hace adecuados para tareas que requieren un posicionamiento preciso.
-
P ¿ Cómo puedo controlar un motor paso a paso?
Se pueden controlar un
motor paso a paso con controladores de motor paso a paso dedicados, microcontroladores o ICS especializados del motor del motor paso a paso. Los métodos de control populares incluyen un paso completo, medio paso y microstapes, cada uno influyendo en el rendimiento y la resolución del motor.
-
P ¿Cuál es la diferencia entre los motores paso a paso bipolares y unipolares?
A
La principal diferencia radica en la configuración del devanado. Los motores bipolares tienen dos bobinas por fase, y la corriente fluye en ambas direcciones, mientras que los motores unipolares tienen un devanado de toque central, y la corriente fluye en una dirección. Los motores bipolares generalmente ofrecen un mayor par.
-
P ¿ Puedo ejecutar un motor paso a paso sin un controlador dedicado?
Un
tiempo es posible ejecutar un motor paso a paso directamente desde un microcontrolador, se recomienda usar un controlador de motor paso a paso dedicado para un mejor rendimiento y protección contra sobrecorriente y sobrecalentamiento. Los controladores del motor paso a paso proporcionan el control de corriente y la configuración de forma de onda necesaria para una operación óptima del motor.
-
P ¿Cuál es la diferencia entre los motores paso a paso bipolares y unipolares?
A
La principal diferencia radica en la configuración del devanado. Los motores bipolares tienen dos bobinas por fase, mientras que los motores unipolares tienen un devanado de toque central. Los motores bipolares generalmente proporcionan un par más alto, pero los motores unipolares son más fáciles de controlar.
-
P ¿ Cómo soluciono problemas de problemas comunes con motores paso a paso?
Una
verificación de conexiones sueltas, verificar la compatibilidad de la fuente de alimentación, inspeccionar el cableado para la polaridad correcta y asegúrese de que no haya obstrucciones mecánicas. Revisar la configuración y las pruebas del controlador con un controlador o controlador alternativo puede ayudar a identificar y resolver problemas.
-
P ¿Los motores paso a paso requieren comentarios para el control de posición?
Un
tiempo, los motores paso a paso pueden funcionar en un sistema de circuito abierto sin retroalimentación, los sistemas de circuito cerrado con dispositivos de retroalimentación como codificadores o sensores se utilizan en aplicaciones donde el control de posición preciso y la corrección de errores son esenciales.
-
P ¿Qué es el microspopping y cómo mejora el rendimiento del motor paso a paso?
Un
microspapado es una técnica que divide cada paso completo de un motor paso a paso en subpasos más pequeños. Esto permite un movimiento más suave, una vibración reducida y una mejor precisión de posicionamiento, especialmente a bajas velocidades.
-
P ¿Cuál es el significado del ángulo de paso en los motores paso a paso?
Un
ángulo de paso es el ángulo a través del cual gira el motor para cada pulso de entrada. Es un parámetro crítico que determina la resolución y la precisión del motor. Los ángulos de paso más pequeños dan como resultado un control más fino, pero pueden requerir una electrónica de accionamiento más compleja.
-
P ¿ Cuáles son los componentes clave de un sistema de motor paso a paso?
Un
sistema de motor paso a paso consiste en el motor paso a paso, un controlador para controlar el motor y un controlador o microcontrolador que genera la secuencia de pulsos para conducir el motor.
-
P ¿ Qué es un motor paso a paso y cómo se diferencia de otros tipos de motores?
Un
motor paso a paso es un dispositivo electromecánico que convierte pulsos eléctricos en movimientos mecánicos precisos. A diferencia de otros motores, se mueve en pasos discretos, lo que permite un control preciso de la posición y la velocidad.
-
P ¿ Pueden funcionar los motores paso a paso en una configuración de bucle abierto?
A
Sí, los motores paso a paso pueden funcionar en un sistema de circuito abierto, donde el control de posición se logra sin dispositivos de retroalimentación externos. Sin embargo, para aplicaciones críticas, los sistemas de circuito cerrado con retroalimentación pueden preferirse para mejorar la precisión y corregir errores.
-
P ¿ Qué es el microspopping y por qué es importante?
Un
microspapado es una técnica que divide cada paso completo de un motor paso a paso en incrementos más pequeños. Esto proporciona un movimiento más suave, reduce la vibración y mejora la precisión. El microspapado es esencial para aplicaciones que exigen precisión.
-
P ¿ Cómo se determina la resolución del paso de un motor paso a paso?
A
La resolución del paso es el ángulo más pequeño que el motor puede moverse en respuesta a un solo pulso de entrada. Está determinado por la construcción del motor, el número de postes y la electrónica de accionamiento. Los recuentos de polos más altos y el microspapado pueden mejorar la resolución.
Para calcular la resolución de paso, puede usar la siguiente fórmula:
-
P ¿ Cuáles son las ventajas de usar motores paso a paso?
Un
motor paso a paso ofrece un control preciso del movimiento, un alto par a bajas velocidades, simplicidad de control y operación de circuito abierto (no se requiere retroalimentación). Son ideales para aplicaciones que requieren un control de posición preciso.
-
P ¿Qué es un motor paso a paso y cómo funciona?
A
Aquí hay un desglose de cómo funciona un motor paso a paso :
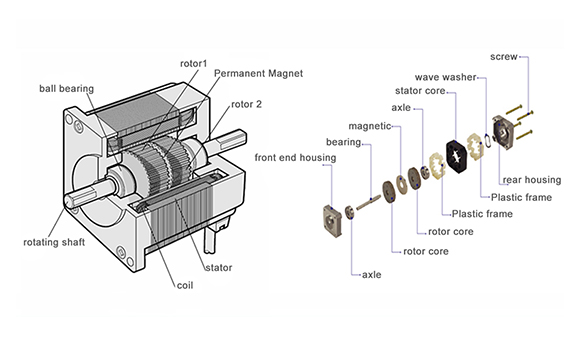
Construcción:
Un motor paso a paso típico comprende un rotor y un estator. El rotor es la parte giratoria, mientras que el estator es la parte estacionaria. El rotor generalmente está equipado con dientes o una estructura magnética que interactúa con los campos magnéticos generados por el estator.
Estator y bobinados:
El estator contiene bobinas de herida de alambre alrededor de los postes. Estas bobinas se energizan secuencialmente para crear un campo magnético giratorio. El número de polos y devanados en el motor determina su ángulo de paso, que es el ángulo a través del cual el motor gira para cada pulso de entrada.
Interacción magnética:
Cuando se aplica una corriente eléctrica a una bobina en el estator, genera un campo magnético. El rotor, que generalmente está hecho de un imán permanente o material ferromagnético, se alinea con el campo magnético creado por la bobina del estator energizado. Esto hace que el rotor se mueva a una posición específica.
Rotación de pasos:
Los motores paso a paso se mueven en pasos discretos, y el ángulo de rotación para cada paso está determinado por el diseño del motor. La secuencia de energizar las bobinas del estator dicta la dirección y la distancia de cada paso. Al controlar la secuencia de estos pulsos, se logra un control preciso sobre la posición y la velocidad del motor.
Señales de control:
Para operar un motor paso a paso, un controlador o microcontrolador envía una serie de pulsos eléctricos a los devanados del estator del motor. El orden y el momento de estos pulsos determinan la dirección y la velocidad del motor. Este método de control permite un posicionamiento preciso sin la necesidad de sensores externos.
Paso completo y microstapping:
Los motores paso a paso pueden funcionar en modo de paso completo, donde cada pulso corresponde a un solo paso. Alternativamente, el microsepping subdivide cada paso en incrementos más pequeños, proporcionando un movimiento más suave y una resolución más fina. El microspapado se logra controlando la corriente en las bobinas del motor con mayor precisión.
-
P ¿ Cuál es la razón principal para usar un motor paso a paso?
Esencialmente
, los motores paso a paso proporcionan un excelente control de velocidad, posicionamiento preciso y repetibilidad de movimiento. Además, los motores paso a paso son muy confiables porque no hay cepillos de contacto en el motor. Esto minimiza la falla mecánica y maximiza la vida útil del motor. Además, los motores paso a paso son más asequibles que otros motores y tienen una amplia gama de aplicaciones.
-
P ¿ Por qué son importantes los motores paso a paso?
Un
motor paso a paso puede producir un par completo e instantáneo, incluso desde un punto muerto. Esto los hace muy útiles para aplicaciones de control de movimiento, donde la precisión, la repetibilidad y la potencia son primordiales.
-
P ¿Qué es la explicación del motor paso a paso?
Los
motores paso a paso son motores DC que se mueven en pasos discretos. Tienen múltiples bobinas organizadas en grupos llamados 'fases '. Al energizar cada fase en secuencia, el motor girará, un paso a la vez. Con un paso controlado por computadora, puede lograr un posicionamiento muy preciso y/o control de velocidad.
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు