-
Q Як у вирішенні проблем із загальними проблемами з кроковими двигунами?
Перевірка
наявності вільних з'єднань, перевірка сумісності живлення, забезпечення належної проводки та полярності та огляньте наявність механічних перешкод. Якщо проблеми зберігаються, перегляньте налаштування контролера та розгляньте тестування з іншим драйвером або контролером для ізоляції проблеми.
-
Q Що таке загальні програми крокових двигунів?
Поетапні
двигуни знаходять програми в різних галузях, включаючи робототехніку, 3D -друк, машини з ЧПУ, медичні пристрої та системи автоматизації. Їх здатність надавати точний контроль робить їх придатними для завдань, що вимагають точного позиціонування.
-
Q Як я можу керувати кроковим двигуном?
Поступальні
двигуни можна керувати за допомогою спеціалізованих крокових контролерів двигунів, мікроконтролерів або спеціалізованих ІМС драйверів двигуна. Популярні методи контролю включають повномасштабні, напівпроти та мікростепінг, кожен впливає на продуктивність та роздільну здатність двигуна.
-
Q Яка різниця між біполярними та однополярними кроковими двигунами?
A
Основна відмінність полягає в конфігурації обмотки. Біполярні двигуни мають дві котушки на фазу, а струм потоків в обох напрямках, тоді як однополярні двигуни мають обмотку, що пробивається, і струм протікає в одному напрямку. Біполярні двигуни, як правило, пропонують більш високий крутний момент.
-
Q Чи можу я запустити кроковий двигун без відданого водія?
Час
, що можна запустити кроковий двигун безпосередньо від мікроконтролера, використовуючи спеціальний кроковий драйвер двигуна, рекомендується для кращої продуктивності та захисту від перенапруження та перегріву. Драйвери моторного кроку забезпечують необхідне управління струмом та формування форми хвиль для оптимальної роботи двигуна.
-
Q Яка різниця між біполярними та однополярними кроковими двигунами?
A
Основна відмінність полягає в конфігурації обмотки. Біполярні двигуни мають дві котушки на фазу, тоді як однополярні двигуни мають обмоту в центрі. Біполярні двигуни, як правило, забезпечують більш високий крутний момент, але однополярні двигуни легше контролювати.
-
Q Як у вирішенні проблем із загальними проблемами з кроковими двигунами?
Перевірка
наявності вільних з'єднань, перевірка сумісності живлення, перевірте наявність проводки на предмет правильної полярності та переконайтеся, що немає механічних перешкод. Перегляд налаштувань контролера та тестування за допомогою альтернативного контролера або драйвера може допомогти визначити та вирішити проблеми.
-
Q Чи потрібні крокові двигуни зворотного зв'язку для контролю позиції?
Час
, що ступінчасті двигуни можуть працювати в системі з відкритим циклом без зворотного зв'язку, системи із закритим циклом із пристроями зворотного зв'язку, такими як кодери або датчики, використовуються в програмах, де точне управління положенням та виправлення помилок є важливими.
-
Q Що таке мікростепінг, і як це покращує крокове двигун?
Мікростеппінг
-це техніка, яка ділить кожен повний крок крокового двигуна на менші кроки. Це дозволяє більш плавним рухом, зменшити вібрацію та вдосконалену точність позиціонування, особливо при низьких швидкостях.
-
Q Яке значення кута кроку в крокових двигунах?
Крок
кроку - це кут, через який двигун обертається для кожного вхідного імпульсу. Це критичний параметр, який визначає роздільну здатність та точність двигуна. Менші кути кроку призводять до більш тонкого контролю, але можуть потребувати більш складної електроніки приводу.
-
Q Які ключові компоненти крокової моторної системи?
Система
крокового двигуна складається з самого крокового двигуна, драйвера для управління двигуном, а також контролера або мікроконтролера, який генерує послідовність імпульсів для керування двигуном.
-
Q Що таке кроковий двигун, і чим він відрізняється від інших типів двигунів?
Крок
-двигун - це електромеханічний пристрій, який перетворює електричні імпульси в точні механічні рухи. На відміну від інших двигунів, він рухається дискретними кроками, що дозволяє точно контролювати положення та швидкість.
-
Q Чи можуть крокові двигуни працювати в конфігурації з відкритим циклом?
Так
, крокові двигуни можуть працювати в системі відкритого циклу, де управління положенням досягається без зовнішніх пристроїв зворотного зв'язку. Однак для критичних застосувань може бути кращим систем із закритим циклом із зворотним зв'язком для підвищення точності та правильних помилок.
-
Q Що таке мікростепінг, і чому це важливо?
Мікростеппінг
- це техніка, яка ділить кожен повний крок крокового двигуна на менші кроки. Це забезпечує більш плавний рух, зменшує вібрацію та підвищує точність. Мікростепінг є важливим для додатків, що вимагають точності.
-
Q Як визначається крок роздільна здатність крокового двигуна?
Роздільна здатність кроку - це найменший кут, який двигун може рухатися у відповідь на один вхідний імпульс. Він визначається конструкцією двигуна, кількістю полюсів та приводною електронікою. Більш високі підрахунки полюсів та мікростепінг можуть посилити роздільну здатність.
Для обчислення роздільної здатності кроку ви можете використовувати таку формулу:
-
Q Які переваги використання крокових двигунів?
Поступальні
двигуни пропонують точний контроль руху, високий крутний момент при низьких швидкостях, простота управління та операції з відкритим циклом (не потрібно зворотного зв'язку). Вони ідеально підходять для додатків, що вимагають точного контролю положення.
-
Q Що таке кроковий двигун, і як він працює?
Ось розбиття того, як працює кроковий двигун :
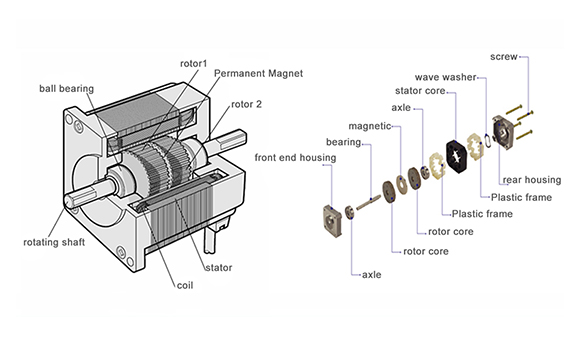
Будівництво:
Типовий кроковий двигун містить ротор і статор. Ротор - це обертова частина, тоді як статор - стаціонарна частина. Ротор зазвичай оснащений зубами або магнітною структурою, яка взаємодіє з магнітними полями, що генеруються статором.
Статори та обмотки:
Статор містить котушки дротяного, рану навколо полюсів. Ці котушки піддаються енергії послідовно для створення обертового магнітного поля. Кількість полюсів і обмоток у двигуні визначає його кут кроку, який є кутом, через який двигун обертається для кожного вхідного імпульсу.
Магнітна взаємодія:
Коли електричний струм застосовується до котушки в статорі, він генерує магнітне поле. Ротор, який, як правило, виготовлений з постійного магніту або феромагнітного матеріалу, узгоджується з магнітним полем, створеним напруженою котушкою статора. Це призводить до того, що ротор переміщується у певну позицію.
Крок обертання:
Крокові двигуни рухаються дискретними кроками, а кут обертання для кожного кроку визначається конструкцією двигуна. Послідовність енергійних котушок статора диктує напрямок і відстань кожного кроку. Контролюючи послідовність цих імпульсів, досягається точний контроль над положенням і швидкістю двигуна.
Контрольні сигнали:
Для роботи крокового двигуна контролер або мікроконтролер надсилає серію електричних імпульсів до обмоток статора двигуна. Порядок та терміни цих імпульсів визначають напрямок та швидкість двигуна. Цей метод управління дозволяє точно розташувати без необхідності зовнішніх датчиків.
Повний крок і мікростепінг:
Steper Motors може працювати в повному кроці, де кожен імпульс відповідає одному кроку. Альтернативно, мікростепінг підрозділяє кожен етап на менші кроки, забезпечуючи більш плавний рух та більш тонке роздільну здатність. Мікростеппінг досягається шляхом точнішого контролю струму в котушках двигуна.
-
Q Яка основна причина використання крокового двигуна?
По
суті, крокові двигуни забезпечують відмінний контроль швидкості, точне позиціонування та повторюваність руху. Також крокові двигуни дуже надійні, оскільки в двигуні немає контактних пензлів. Це мінімізує механічну збій і максимізує термін експлуатації двигуна. Більше того, крокові двигуни є більш доступними, ніж інші двигуни, і мають широкий спектр додатків.
-
Q Чому важливі крокові двигуни?
Поетапні
двигуни можуть виробляти повний, миттєвий крутний момент - навіть від зупинки. Це робить їх дуже корисними для програм управління рухом, де точність, повторюваність та потужність є першорядними.
-
Q Що таке крокове моторне пояснення?
Поетапні
двигуни - це двигуни постійного струму, які рухаються в дискретних кроках. У них є кілька котушок, які організовані в групах, які називаються 'фазами '. Підвищуючи кожну фазу послідовно, двигун буде обертатися, по одному кроку. За допомогою керованого комп'ютера ви можете досягти дуже точного позиціонування та/або управління швидкістю.
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు