-
P Kako mogu riješiti uobičajene probleme s Stepper Motors -om?
Provjera
labave veze, provjerite kompatibilnost napajanja, osigurajte pravilno ožičenje i polaritet i pregledajte ima li mehaničkih začepljenja. Ako problemi i dalje postoje, pregledajte postavke kontrolera i razmislite o testiranju s drugim vozačem ili kontrolerom kako biste izolirali problem.
-
P Koje su uobičajene primjene stepper motora?
Konačni
motori pronalaze aplikacije u različitim područjima, uključujući robotiku, 3D ispis, CNC strojeve, medicinske uređaje i automatizacijske sustave. Njihova sposobnost pružanja precizne kontrole čini ih prikladnim za zadatke koji zahtijevaju točno pozicioniranje.
-
P Kako mogu kontrolirati stepper motor?
Stepper
Motors može se upravljati pomoću namjenskih kontrolera stepper motora, mikrokontrolera ili specijaliziranih ICS -a za pokretačke korake. Popularne kontrolne metode uključuju cijeli korak, polustepe i mikrostepping, a svaka je utjecala na motoričke performanse i rezoluciju.
-
P Koja je razlika između bipolarnih i unipolarnih stepper motora?
A
glavna razlika leži u namotanoj konfiguraciji. Bipolarni motori imaju dvije zavojnice po fazi, a struja protoka u oba smjera, dok unipolarni motori imaju namotavanje u sredini, a struja teče u jednom smjeru. Bipolarni motori uglavnom nude veći okretni moment.
-
P Mogu li pokrenuti stepper motor bez namjenskog vozača?
Neko
vrijeme je moguće pokrenuti stepper motor izravno iz mikrokontrolera, koristeći namjenski pokretač stepper motora za bolje performanse i zaštitu od prekomjernog strujanja i pregrijavanja. Supper Motor upravljački programi pružaju potrebnu kontrolu struje i oblikovanje valnog oblika za optimalni rad motora.
-
P Koja je razlika između bipolarnih i unipolarnih stepper motora?
A
glavna razlika leži u namotanoj konfiguraciji. Bipolarni motori imaju dvije zavojnice po fazi, dok unipolarni motori imaju namotavanje u sredini. Bipolarni motori uglavnom pružaju veći okretni moment, ali unipolarne motore je lakše kontrolirati.
-
P Kako mogu riješiti uobičajene probleme s Stepper Motors -om?
Provjera
labave veze, provjerite kompatibilnost s napajanjem, pregledajte ispravan polaritet i osigurajte da nema mehaničkih opstrukcija. Pregled postavki i testiranja kontrolera s alternativnim kontrolerom ili vozačem može pomoći u prepoznavanju i rješavanju problema.
-
P Da li stepper motori zahtijevaju povratne informacije za kontrolu položaja?
Neko
vrijeme stepper motori mogu raditi u sustavu otvorene petlje bez povratnih informacija, sustavi zatvorene petlje s povratnim uređajima poput kodera ili senzora koriste se u aplikacijama gdje su precizna kontrola položaja i korekcija pogrešaka neophodna.
-
P Što je Microstepping i kako poboljšava performanse stepper motora?
Mikrostepping
je tehnika koja svaki puni korak koračnog motora dijeli na manje pod-korake. To omogućava glatko kretanje, smanjenu vibraciju i poboljšanu točnost pozicioniranja, posebno pri malim brzinama.
-
P Koji je značaj korakovnog kuta u stepper motorima?
Kut
koraka je kut kroz koji se motor okreće za svaki ulazni impuls. To je kritični parametar koji određuje rezoluciju i točnost motora. Manji kutovi koraka rezultiraju finijom kontrolom, ali mogu zahtijevati složeniju pogonsku elektroniku.
-
P Koje su ključne komponente stepper motornog sustava?
A
korački motorni sustav sastoji se od samog koračnog motora, pokretača za upravljanje motorom, i regulatora ili mikrokontrolera koji stvara slijed impulsa za pokretanje motora.
-
P Što je stepper motor i kako se razlikuje od ostalih vrsta motora?
Konačni
motor je elektromehanički uređaj koji pretvara električne impulse u precizne mehaničke pokrete. Za razliku od drugih motora, kreće se u diskretnim koracima, omogućujući točnu kontrolu položaja i brzine.
-
Q Mogu li Stepper Motors raditi u konfiguraciji otvorene petlje?
Da
, stepper motori mogu raditi u sustavu otvorene petlje, gdje se kontrola položaja postiže bez vanjskih uređaja za povratne informacije. Međutim, za kritične aplikacije mogu se preferirati sustavi zatvorene petlje s povratnim informacijama kako bi poboljšali točnost i ispravili pogreške.
-
P Što je Microstepping i zašto je to važno?
Mikrostepping
je tehnika koja svaki puni korak koračnog motora dijeli na manje korake. To omogućuje glatko kretanje, smanjuje vibracije i poboljšava točnost. Microstepping je neophodno za aplikacije koje zahtijevaju preciznost.
-
P Kako se određuje rezolucija koraka koračnog motora?
A
Rezolucija koraka je najmanji kut koji motor može pomaknuti kao odgovor na jedan ulazni impuls. Određuje ga konstrukcija motora, broj stupova i pogonska elektronika. Viši broj polja i mikrostepping mogu povećati razlučivost.
Da biste izračunali rezoluciju koraka, možete koristiti sljedeću formulu:
-
P Koje su prednosti korištenja stepper motora?
Konačni
motori nude preciznu kontrolu kretanja, visoki okretni moment pri malim brzinama, jednostavnost kontrole i rad na otvorenom krugu (nije potrebna povratna informacija). Idealni su za aplikacije koje zahtijevaju točnu kontrolu položaja.
-
P Što je koračni motor i kako to funkcionira?
A
Evo raščlanjivanja kako djeluje stepper motor :
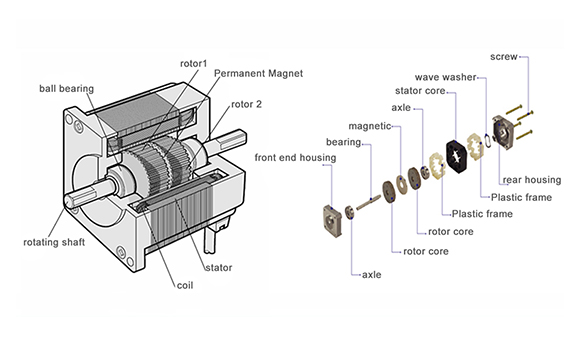
Konstrukcija:
Tipični stepper motor sastoji se od rotora i statora. Rotor je rotirajući dio, dok je stator stacionarni dio. Rotor je obično opremljen zubima ili magnetskom strukturom koja komunicira s magnetskim poljima koje generira stator.
Stator i namoti:
Stator sadrži zavojnice žice rane oko stupova. Ove se zavojnice se uzastopno snalaze kako bi se stvorilo rotirajuće magnetsko polje. Broj stupova i namota u motoru određuje njegov kut koraka, a to je kut kroz koji se motor okreće za svaki ulazni impuls.
Magnetska interakcija:
Kad se električna struja primijeni na zavojnicu u statoru, ona stvara magnetsko polje. Rotor, koji je obično izrađen od trajnog magneta ili feromagnetskog materijala, poravnava se s magnetskim poljem stvorenim energetskim zavojnicama statora. Zbog toga se rotor prelazi na određeni položaj.
Rotacija koraka:
Konačni motori kreću se u diskretnim koracima, a kut rotacije za svaki korak određuje se dizajnom motora. Slijed energije za zavojnice statora diktira smjer i udaljenost svakog koraka. Kontroliranjem slijeda ovih impulsa postiže se precizna kontrola nad položajem i brzinom motora.
Kontrolni signali:
Za upravljanje koračnim motorom, regulator ili mikrokontroler šalje niz električnih impulsa na namotavanje statora motora. Redoslijed i vrijeme ovih impulsa određuje smjer i brzinu motora. Ova metoda upravljanja omogućuje točno pozicioniranje bez potrebe za vanjskim senzorima.
Puni korak i mikrostepping:
Konačni motori mogu raditi u načinu rada u cijelosti, gdje svaki impuls odgovara jednom koraku. Alternativno, Microstepping podijeli svaki korak u manjim koracima, pružajući glatku kretanje i finu rezoluciju. Mikrostepping se postiže preciznijem kontrolom struje u zavojnicama motora.
-
P Koji je glavni razlog korištenja stepper motora?
U
osnovi, stepper motori pružaju izvrsnu kontrolu brzine, precizno pozicioniranje i ponovljivost pokreta. Također, stepper motori su vrlo pouzdani jer u motoru nema četkica za kontakt. To minimizira mehanički kvar i maksimizira vijek trajanja motora. Nadalje, stepper motori su pristupačniji od ostalih motora i imaju širok spektar aplikacija.
-
P Zašto su stepper motori važni?
Konačni
motori mogu proizvesti potpuni, trenutni okretni moment - čak i iz zastoja. To ih čini vrlo korisnim za aplikacije za kontrolu pokreta, gdje su točnost, ponovljivost i snaga najvažnija.
-
P Što je objašnjenje stepper motora?
Konačni
motori su DC motori koji se kreću u diskretnim koracima. Imaju više zavojnica koje su organizirane u skupinama koje se nazivaju 'faze '. Energiranjem svake faze u nizu, motor će se okretati, jedan korak po korak. Pomoću računala s kontroliranim korakom možete postići vrlo precizno pozicioniranje i/ili kontrolu brzine.
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు