-
Q Bagaimanakah saya menyelesaikan masalah biasa dengan Stepper Motors?
Semak
sambungan longgar, sahkan keserasian bekalan kuasa, pastikan pendawaian dan polariti yang betul, dan periksa halangan mekanikal. Sekiranya masalah berterusan, semak tetapan pengawal, dan pertimbangkan ujian dengan pemandu atau pengawal yang berbeza untuk mengasingkan isu tersebut.
-
Q Apakah aplikasi biasa motor stepper?
Motor
Stepper mencari aplikasi dalam pelbagai bidang, termasuk robotik, percetakan 3D, mesin CNC, peranti perubatan, dan sistem automasi. Keupayaan mereka untuk memberikan kawalan yang tepat menjadikan mereka sesuai untuk tugas yang memerlukan kedudukan yang tepat.
-
Q Bagaimana saya boleh mengawal motor stepper?
Motor
stepper boleh dikawal menggunakan pengawal motor stepper khusus, mikrokontroler, atau ICS pemandu motor stepper khusus. Kaedah kawalan popular termasuk langkah penuh, separuh langkah, dan microstepping, masing-masing mempengaruhi prestasi dan resolusi motor.
-
Q Apakah perbezaan antara motor stepper bipolar dan unipolar?
A
perbezaan utama terletak pada konfigurasi penggulungan. Motor bipolar mempunyai dua gegelung setiap fasa, dan aliran semasa di kedua-dua arah, manakala motor unipolar mempunyai penggulungan pusat, dan aliran semasa dalam satu arah. Motor bipolar umumnya menawarkan tork yang lebih tinggi.
-
Q Bolehkah saya menjalankan motor stepper tanpa pemandu yang berdedikasi?
Sementara
itu, mungkin untuk menjalankan motor stepper secara langsung dari mikrokontroler, menggunakan pemandu motor stepper khusus disyorkan untuk prestasi dan perlindungan yang lebih baik terhadap overcurrent dan overheating. Pemandu motor stepper menyediakan kawalan semasa dan bentuk gelombang yang diperlukan untuk operasi motor yang optimum.
-
Q Apakah perbezaan antara motor stepper bipolar dan unipolar?
A
perbezaan utama terletak pada konfigurasi penggulungan. Motor bipolar mempunyai dua gegelung setiap fasa, manakala motor unipolar mempunyai penggulungan pusat. Motor bipolar umumnya memberikan tork yang lebih tinggi, tetapi motor unipolar lebih mudah dikawal.
-
Q Bagaimanakah saya menyelesaikan masalah biasa dengan Stepper Motors?
Semak
sambungan longgar, sahkan keserasian bekalan kuasa, periksa pendawaian untuk polariti yang betul, dan pastikan tiada halangan mekanikal. Mengkaji tetapan pengawal dan ujian dengan pengawal atau pemandu alternatif dapat membantu mengenal pasti dan menyelesaikan masalah.
-
Q Adakah motor stepper memerlukan maklum balas untuk kawalan kedudukan?
Walaupun
motor stepper boleh beroperasi dalam sistem gelung terbuka tanpa maklum balas, sistem gelung tertutup dengan peranti maklum balas seperti encoder atau sensor digunakan dalam aplikasi di mana kawalan kedudukan dan pembetulan kesilapan yang tepat adalah penting.
-
Q Apakah microstepping, dan bagaimanakah ia meningkatkan prestasi motor stepper?
Microstepping
adalah teknik yang membahagikan setiap langkah penuh motor stepper ke sub-langkah yang lebih kecil. Ini membolehkan gerakan yang lebih lancar, mengurangkan getaran, dan ketepatan kedudukan yang lebih baik, terutamanya pada kelajuan rendah.
-
Q Apakah kepentingan sudut langkah dalam motor stepper?
Sudut
langkah adalah sudut yang mana motor berputar untuk setiap nadi input. Ia adalah parameter kritikal yang menentukan resolusi dan ketepatan motor. Sudut langkah yang lebih kecil menghasilkan kawalan yang lebih baik tetapi mungkin memerlukan elektronik pemacu yang lebih kompleks.
-
Q Apakah komponen utama sistem motor stepper?
Sistem
motor stepper terdiri daripada motor stepper itu sendiri, pemandu untuk mengawal motor, dan pengawal atau mikrokontroler yang menghasilkan urutan denyutan untuk memandu motor.
-
Q Apakah motor stepper, dan bagaimanakah ia berbeza dari jenis motor lain?
Motor
stepper adalah peranti elektromekanik yang menukarkan denyutan elektrik menjadi pergerakan mekanikal yang tepat. Tidak seperti motor lain, ia bergerak dalam langkah -langkah diskret, yang membolehkan kawalan kedudukan dan kelajuan yang tepat.
-
Q Bolehkah motor stepper beroperasi dalam konfigurasi gelung terbuka?
Ya
, motor stepper boleh beroperasi dalam sistem gelung terbuka, di mana kawalan kedudukan dicapai tanpa peranti maklum balas luaran. Walau bagaimanapun, untuk aplikasi kritikal, sistem gelung tertutup dengan maklum balas mungkin lebih disukai untuk meningkatkan ketepatan dan kesilapan yang betul.
-
Q Apakah microstepping, dan mengapa penting?
Microstepping
adalah teknik yang membahagikan setiap langkah penuh motor stepper menjadi kenaikan yang lebih kecil. Ini memberikan gerakan yang lebih lancar, mengurangkan getaran, dan meningkatkan ketepatan. Microstepping adalah penting untuk aplikasi yang menuntut ketepatan.
-
Q Bagaimanakah resolusi langkah motor stepper ditentukan?
A
Resolusi langkah adalah sudut terkecil motor boleh bergerak sebagai tindak balas kepada nadi input tunggal. Ia ditentukan oleh pembinaan motor, bilangan tiang, dan elektronik pemacu. Kira -kira kutub yang lebih tinggi dan microstepping dapat meningkatkan resolusi.
Untuk mengira resolusi langkah, anda boleh menggunakan formula berikut:
-
Q Apakah kelebihan menggunakan motor stepper?
Motor
stepper menawarkan kawalan tepat pergerakan, tork tinggi pada kelajuan rendah, kesederhanaan kawalan, dan operasi gelung terbuka (tiada maklum balas yang diperlukan). Mereka sesuai untuk aplikasi yang memerlukan kawalan kedudukan yang tepat.
-
Q Apakah motor stepper, dan bagaimana ia berfungsi?
A
Inilah pecahan bagaimana motor stepper berfungsi :
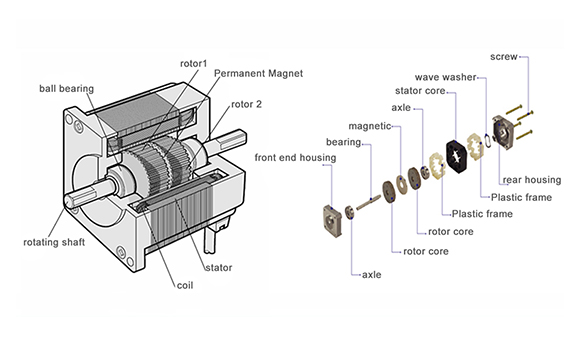
Pembinaan:
Motor stepper biasa terdiri daripada pemutar dan pemegun. Rotor adalah bahagian berputar, manakala stator adalah bahagian pegun. Rotor biasanya dilengkapi dengan gigi atau struktur magnet yang berinteraksi dengan medan magnet yang dihasilkan oleh stator.
Stator dan belitan:
Stator mengandungi gegelung luka dawai di sekitar tiang. Gegelung ini bertenaga secara berurutan untuk membuat medan magnet berputar. Bilangan tiang dan belitan dalam motor menentukan sudut langkahnya, yang merupakan sudut yang mana motor berputar untuk setiap nadi input.
Interaksi magnet:
Apabila arus elektrik digunakan pada gegelung di stator, ia menghasilkan medan magnet. Rotor, yang biasanya diperbuat daripada magnet kekal atau bahan ferromagnet, sejajar dengan medan magnet yang dicipta oleh gegelung stator bertenaga. Ini menyebabkan pemutar bergerak ke kedudukan tertentu.
Putaran langkah:
Stepper Motors bergerak dalam langkah -langkah diskret, dan sudut putaran untuk setiap langkah ditentukan oleh reka bentuk motor. Urutan tenaga gegelung stator menentukan arah dan jarak setiap langkah. Dengan mengawal urutan denyutan ini, kawalan tepat ke atas kedudukan dan kelajuan motor dicapai.
Isyarat kawalan:
Untuk mengendalikan motor stepper, pengawal atau mikrokontroler menghantar satu siri denyutan elektrik ke gelombang stator motor. Perintah dan masa denyutan ini menentukan arah dan kelajuan motor. Kaedah kawalan ini membolehkan kedudukan yang tepat tanpa memerlukan sensor luaran.
Langkah penuh dan microstepping:
Stepper Motors boleh beroperasi dalam mod penuh, di mana setiap nadi sepadan dengan satu langkah. Sebagai alternatif, subdivida microstepping setiap langkah menjadi kenaikan yang lebih kecil, memberikan gerakan yang lebih lancar dan resolusi yang lebih halus. Microstepping dicapai dengan mengawal arus dalam gegelung motor dengan lebih tepat.
-
Q Apakah sebab utama menggunakan motor stepper?
Pada
dasarnya, motor stepper memberikan kawalan kelajuan yang sangat baik, kedudukan yang tepat, dan kebolehulangan gerakan. Juga, motor stepper sangat boleh dipercayai kerana tidak ada berus kenalan dalam motor. Ini meminimumkan kegagalan mekanikal dan memaksimumkan kehidupan motor. Selain itu, Stepper Motors lebih murah daripada motor lain dan mempunyai pelbagai aplikasi.
-
Q Mengapa motor stepper penting?
Motor
stepper boleh menghasilkan tork penuh dan seketika - walaupun dari terhenti. Ini menjadikan mereka sangat berguna untuk aplikasi kawalan gerakan, di mana ketepatan, kebolehulangan, dan kuasa adalah yang paling utama.
-
Q Apakah penjelasan motor stepper?
Motor
stepper adalah motor DC yang bergerak dalam langkah -langkah diskret. Mereka mempunyai beberapa gegelung yang dianjurkan dalam kumpulan yang dipanggil 'fasa '. Dengan memberi tenaga setiap fasa dalam urutan, motor akan berputar, satu langkah pada satu masa. Dengan melangkah keluar komputer, anda boleh mencapai kedudukan dan/atau kawalan kelajuan yang sangat tepat.
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు