Generelle tekniske egenskaber
● Steppermotor bruges i lavhastighedsbegivenheder --- hastigheden skal ikke overstige 1000 o / min (6666 pps ved 0,9 grader), og det er bedst at bruge den mellem 1000-3000 pps (0,9 grader). Motoren har høj arbejdseffektivitet og lav støj;
● Det er bedst ikke at bruge steppermotorens fulde trin, og vibrationen er stor i fuld-trinstilstand;
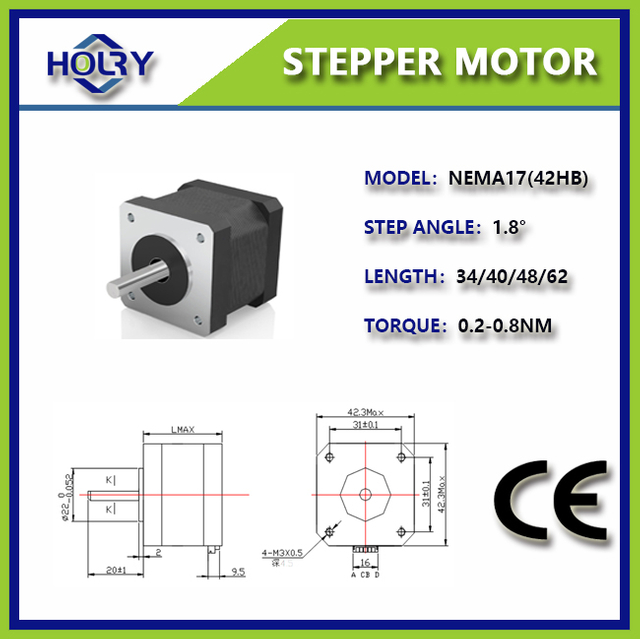
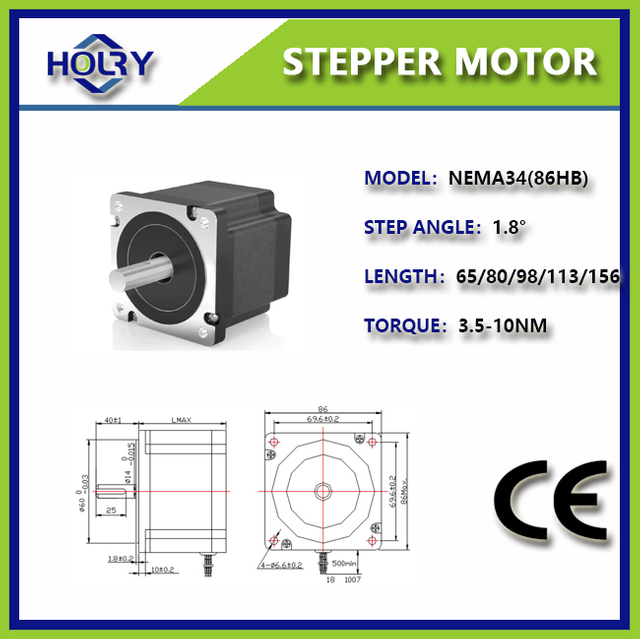
● Spændingsværdien af motorspecifikationen er ikke kørselsspændingsværdien. Den specifikke kørselsspænding kan vælges i henhold til stepper-driveren (anbefaling: 42 og under motorer bruger 12-24V, 57 motorer bruger DC 24V-48V, 86 Brug DC 48-80V, 110 Motoren vedtager højere end DC 80V)
● For belastninger med stort inerti øjeblik skal der vælges en stor rammestørrelsesmotor;
● Når motoren er under høj hastighed eller stor inertibelastning, starter den generelt ikke ved arbejdshastigheden, men øger gradvist hyppigheden og hastigheden. Først mister motoren ikke trin. For det andet kan det reducere støj og forbedre placeringsnøjagtigheden ved at stoppe;
● I tilfælde af høj præcision skal den løses ved mekanisk deceleration, øge motorhastigheden eller ved hjælp af en driver med høj underafdeling;
● Motoren skal ikke fungere i vibrationsområdet, hvis det er nødvendigt, kan den løses ved at ændre spænding, strøm eller tilføje noget dæmpning;
● Når motoren fungerer under 600 pps (0,9 grader), skal den drives af lille strøm, stor induktans og lav spænding.
Mekaniske tekniske egenskaber
● Når du installerer/fjerner koblingsdelen med steppermotorakslenden, skal du ikke slå skaftets ende med en hammer direkte. (Hammeren rammer direkte skaftets ende, og koderen i den anden ende af steppermotorakslen kan blive beskadiget);
● Prøv at justere skaftets ender til den bedste tilstand for at sikre god koncentricitet, ellers kan vibrationer forekomme, lejer kan blive beskadiget, eller endda kan aksler brydes;
● Motoren kan bruges på steder, der vil blive angrebet af vand- eller olie-dråber, men den er ikke fuldt vandtæt eller oliefast. Standardbeskyttelsesniveauet er IP54. Derfor bør motoren ikke placeres eller bruges i et miljø eroderet af vand eller olie (hvis nødvendigt specielt beskyttelsesniveau, bedes du kontakte os!);
● Hvis motoren er tilsluttet et reduktionsgear, skal den forsegles med olie, når du bruger en steppermotor for at forhindre reduktionsudstyret i at komme ind i steppermotoren;
● Indsummer ikke motorkablet i olie eller vand. Sørg for, at kablet ikke udsættes for øjeblik eller lodret vægt på grund af ekstern bøjningskraft eller dens egen vægt, især ved kabeltudløbet eller forbindelsen.
● I tilfælde af motorisk bevægelse skal kablet (det vil sige det, der følger med motoren), fastgøres sikkert til en stationær del (overfor motoren), og det skal forsinkes med et ekstra kabelbelastet i kabelholderen, så bøjning af stress kan minimeres. Kabelalbuens radius skal være så stor som muligt
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు