Características técnicas gerais
● O motor de passo é usado em ocasiões de baixa velocidade-a velocidade não deve exceder 1000 rpm, (6666pps a 0,9 graus) e é melhor usá-lo entre 1000-3000pps (0,9 graus). O motor tem alta eficiência de trabalho e baixo ruído;
● É melhor não usar o estado de passo completo do motor de passo, e a vibração é grande no estado de etapa inteira;
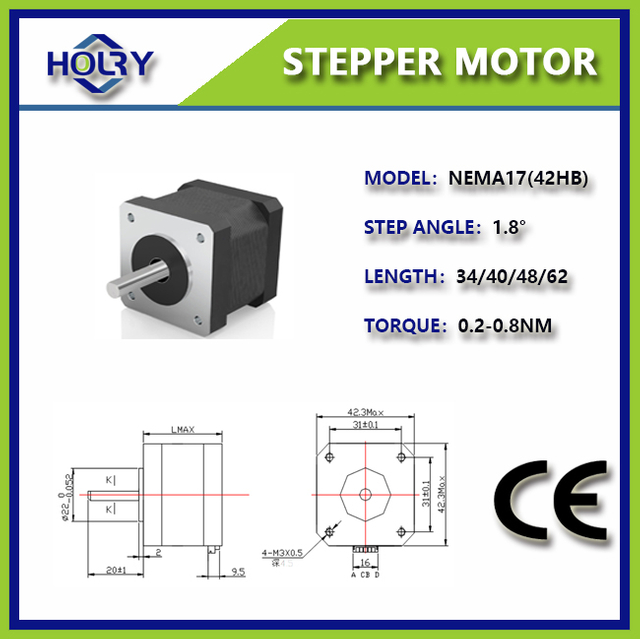
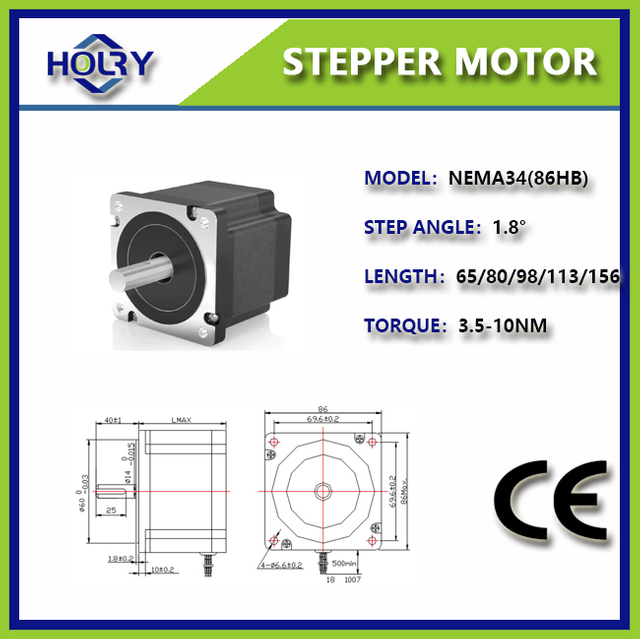
● O valor da tensão da especificação do motor não é o valor da tensão de direção. A tensão de direção específica pode ser selecionada de acordo com o driver de passo (recomendação: 42 e abaixo os motores usam 12-24V, 57 motores usam DC 24V-48V, 86 Use CC 48-80V, 110 O motor adota mais que DC 80V)
● Para cargas com grande momento de inércia, um motor de tamanho grande deve ser selecionado;
● Quando o motor está sob carga de inércia de alta velocidade ou grande, geralmente não começa na velocidade de trabalho, mas aumenta gradualmente a frequência e a velocidade. Primeiro, o motor não perde passos. Segundo, pode reduzir o ruído e melhorar a precisão do posicionamento da parada;
● Em caso de alta precisão, deve ser resolvido por desaceleração mecânica, aumentando a velocidade do motor ou usando um driver com alta subdivisão;
● O motor não deve funcionar na área de vibração, se necessário, pode ser resolvido alterando a tensão, a corrente ou a adição de algum amortecimento;
● Quando o motor funciona abaixo de 600pps (0,9 graus), ele deve ser acionado por pequena corrente, grande indutância e baixa tensão.
Características técnicas mecânicas
● Ao instalar/remover a parte de acoplamento com a extremidade do eixo do motor de passo, não aperte a extremidade do eixo com um martelo diretamente. (O martelo atinge diretamente a extremidade do eixo e o codificador na outra extremidade do eixo do motor de passo pode ser danificado);
● Tente alinhar as extremidades do eixo ao melhor estado para garantir uma boa concordância; caso contrário, poderão ocorrer vibração, os rolamentos podem ser danificados ou até os eixos podem ser quebrados;
● O motor pode ser usado em locais que serão atacados por gotículas de água ou óleo, mas não é totalmente à prova d'água ou à prova de óleo. O nível de proteção padrão é IP54. Portanto, o motor não deve ser colocado ou usado em um ambiente corroído por água ou óleo (se necessário, nível de proteção especial, entre em contato conosco!);
● Se o motor estiver conectado a uma engrenagem de redução, ele deve ser selado com óleo ao usar um motor de passo para impedir que a engrenagem de redução entre no motor de passo;
● Não mergulhe o cabo do motor em óleo ou água. Certifique -se de que o cabo não esteja submetido a um momento ou peso vertical devido à força de flexão externa ou seu próprio peso, especialmente na tomada ou conexão de cabo.
● No caso do movimento do motor, o cabo (ou seja, aquele que vem com o motor) deve ser preso com segurança a uma parte estacionária (em frente ao motor) e deve ser atrasada com um cabo adicional carregado no suporte do cabo, para que a tensão flexível possa ser minimizada. O raio do cotovelo do cabo deve ser o mais grande possível
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు