Características técnicas generales
● El motor paso a paso se usa en ocasiones de baja velocidad --- la velocidad no debe exceder las 1000 rpm (6666pps a 0.9 grados), y es mejor usarla entre 1000-3000pps (0.9 grados). El motor tiene una alta eficiencia de trabajo y bajo ruido;
● Es mejor no usar el estado de paso completo del motor paso a paso, y la vibración es grande en el estado de paso completo;
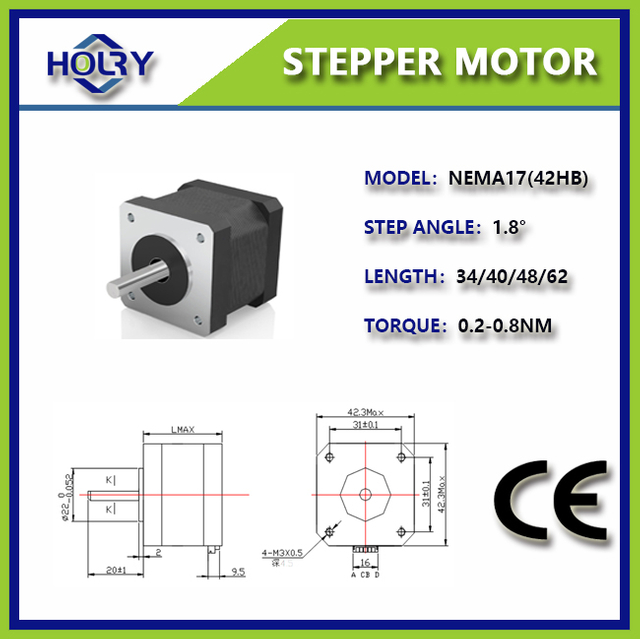
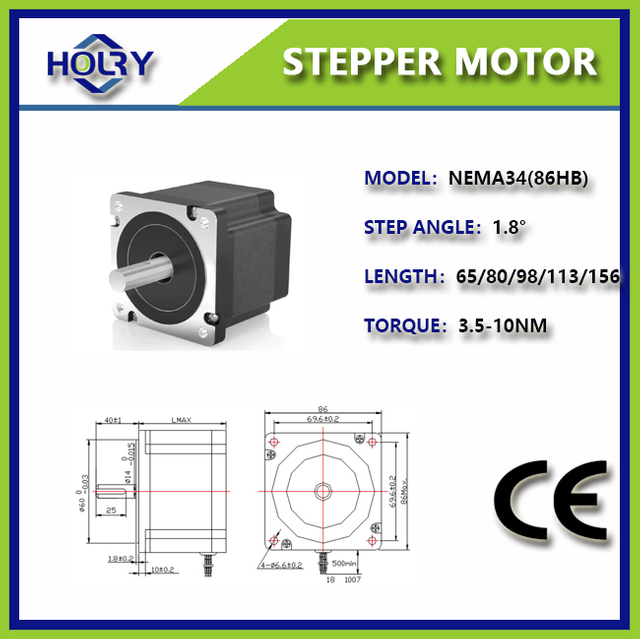
● El valor de voltaje de la especificación del motor no es el valor de voltaje de conducción. El voltaje de conducción específico se puede seleccionar de acuerdo con el controlador paso a paso (Recomendación: 42 y por debajo de los motores Usan 12-24V, 57 motores usan DC 24V-48V, 86 Use DC 48-80V, 110 El motor adopta más que DC 80V)
● Para cargas con un gran momento de inercia, se debe seleccionar un motor de tamaño de marco grande;
● Cuando el motor está a alta velocidad o una gran carga de inercia, generalmente no comienza a la velocidad de trabajo, sino que aumenta gradualmente la frecuencia y la velocidad. Primero, el motor no pierde pasos. En segundo lugar, puede reducir el ruido y mejorar la precisión de posicionamiento de la parada;
● En caso de alta precisión, debe resolverse mediante desaceleración mecánica, aumentar la velocidad del motor o usar un controlador con alta subdivisión;
● El motor no debe funcionar en el área de vibración, si es necesario, se puede resolver cambiando el voltaje, la corriente o agregando algo de amortiguación;
● Cuando el motor funciona por debajo de 600pps (0.9 grados), debe ser impulsado por una pequeña corriente, inductancia grande y bajo voltaje.
Características técnicas mecánicas
● Al instalar/quitar la parte de acoplamiento con el extremo del eje del motor paso a paso, no golpee el extremo del eje con un martillo directamente. (El martillo golpea directamente el extremo del eje, y el codificador en el otro extremo del eje del motor paso a paso puede dañarse);
● Trate de alinear los extremos del eje al mejor estado para garantizar una buena concentricidad, de lo contrario, la vibración puede ocurrir, los rodamientos pueden dañarse o incluso los ejes pueden romperse;
● El motor se puede usar en lugares que serán atacados por gotas de agua o aceite, pero no es completamente impermeable o a prueba de aceite. El nivel de protección predeterminado es IP54. Por lo tanto, el motor no debe colocarse ni usarse en un entorno erosionado por agua o aceite (si es necesario, nivel de protección especial, ¡contáctenos!);
● Si el motor está conectado a un engranaje de reducción, debe sellarse con aceite al usar un motor paso a paso para evitar que el engranaje de reducción ingrese al motor paso a paso;
● No sumerja el cable del motor en aceite o agua. Asegúrese de que el cable no esté sujeto a momento o peso vertical debido a la fuerza de flexión externa o su propio peso, especialmente en la salida o conexión del cable.
● En el caso del movimiento del motor, el cable (es decir, el que viene con el motor) debe fijarse de forma segura a una parte estacionaria (opuesta al motor) y debe retrasarse con un cable adicional cargado en el soporte del cable, de modo que se puede minimizar la tensión de flexión. El radio del codo del cable debe ser lo más grande posible
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు