Pangkalahatang mga katangian ng teknikal
● Ang motor ng stepper ay ginagamit sa mga mababang bilis na okasyon --- Ang bilis ay hindi dapat lumampas sa 1000 rpm, (6666pps sa 0.9 degree), at pinakamahusay na gamitin ito sa pagitan ng 1000-3000pps (0.9 degree). Ang motor ay may mataas na kahusayan sa pagtatrabaho at mababang ingay;
● Mas mahusay na huwag gamitin ang buong hakbang na estado ng motor ng stepper, at ang panginginig ng boses ay malaki sa buong estado;
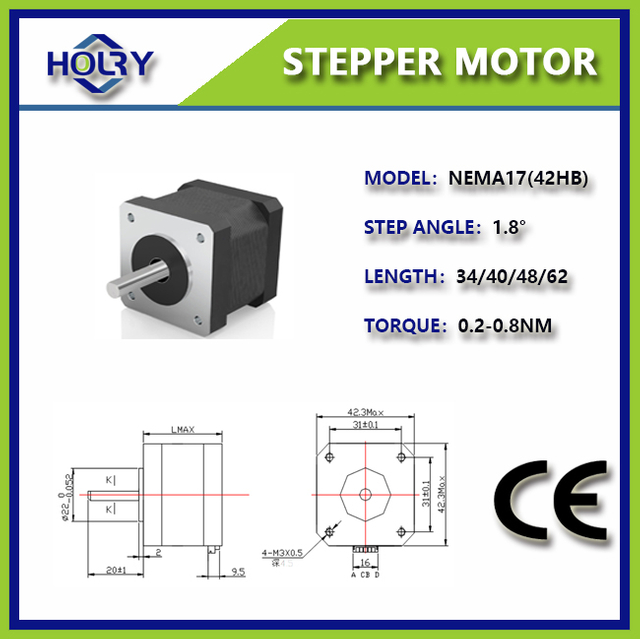
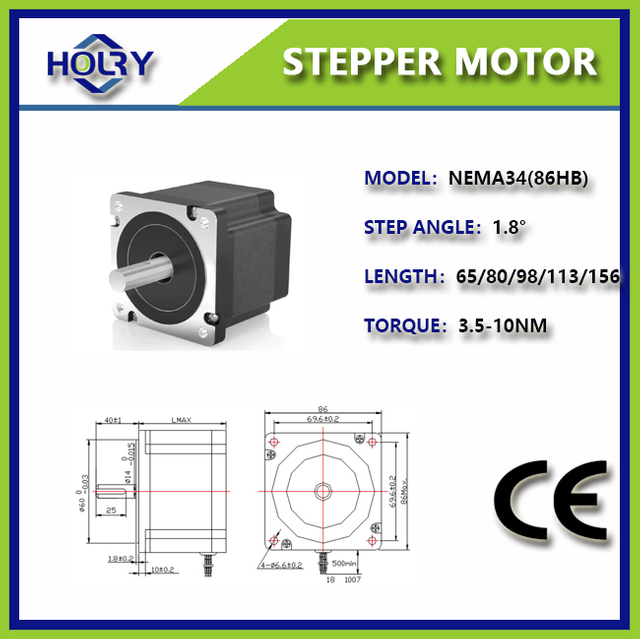
● Ang halaga ng boltahe ng pagtutukoy ng motor ay hindi ang halaga ng boltahe sa pagmamaneho. Ang tiyak na boltahe sa pagmamaneho ay maaaring mapili ayon sa driver ng stepper (rekomendasyon: 42 at sa ibaba ng mga motor ay gumagamit ng 12-24V, 57 motor na gumagamit ng DC 24V-48V, 86 Gumamit ng DC 48-80V, 110 Ang motor ay nagpatibay ng mas mataas kaysa sa DC 80V)
● Para sa mga naglo -load na may malaking sandali ng pagkawalang -galaw, dapat na mapili ang isang malaking laki ng frame ng frame;
● Kapag ang motor ay nasa ilalim ng mataas na bilis o malaking pagkarga ng inertia, sa pangkalahatan ay hindi ito nagsisimula sa bilis ng pagtatrabaho, ngunit unti -unting pinatataas ang dalas at bilis. Una, ang motor ay hindi nawawalan ng mga hakbang. Pangalawa, maaari itong mabawasan ang ingay at pagbutihin ang pagpoposisyon ng kawastuhan ng paghinto;
● Sa kaso ng mataas na katumpakan, dapat itong malutas sa pamamagitan ng mekanikal na pagkabulok, pagtaas ng bilis ng motor, o paggamit ng isang driver na may mataas na subdibisyon;
● Ang motor ay hindi dapat gumana sa lugar ng panginginig ng boses, kung kinakailangan, malulutas ito sa pamamagitan ng pagbabago ng boltahe, kasalukuyang o pagdaragdag ng ilang damping;
● Kapag ang motor ay gumagana sa ibaba 600pps (0.9 degree), dapat itong itulak ng maliit na kasalukuyang, malaking inductance at mababang boltahe.
Mga katangian ng teknikal na teknikal
● Kapag ang pag -install/pag -alis ng bahagi ng pagkabit na may dulo ng stepper motor shaft, huwag pindutin ang dulo ng baras na may martilyo nang direkta. (Ang martilyo ay direktang tumama sa dulo ng baras, at ang encoder sa kabilang dulo ng stepper motor shaft ay maaaring masira);
● Subukang ihanay ang shaft ay nagtatapos sa pinakamahusay na estado upang matiyak ang mahusay na concentricity, kung hindi man maaaring mangyari ang panginginig ng boses, maaaring masira ang mga bearings, o kahit na ang mga shaft ay maaaring masira;
● Ang motor ay maaaring magamit sa mga lugar na aatake ng mga patak ng tubig o langis, ngunit hindi ito ganap na hindi tinatagusan ng tubig o patunay ng langis. Ang antas ng default na proteksyon ay IP54. Samakatuwid, ang motor ay hindi dapat mailagay o magamit sa isang kapaligiran na tinanggal ng tubig o langis (kung kinakailangan na antas ng espesyal na proteksyon, mangyaring makipag -ugnay sa amin!);
● Kung ang motor ay konektado sa isang pagbawas ng gear, dapat itong selyadong may langis kapag gumagamit ng isang motor na stepper upang maiwasan ang pagbabawas ng gear mula sa pagpasok sa motor ng stepper;
● Huwag ibabad ang motor cable sa langis o tubig. Siguraduhin na ang cable ay hindi napapailalim sa sandali o patayong timbang dahil sa panlabas na baluktot na puwersa o sariling timbang, lalo na sa cable outlet o koneksyon.
● Sa kaso ng paggalaw ng motor, ang cable (iyon ay, ang kasama ng motor) ay dapat na ligtas na mai -fasten sa isang nakatigil na bahagi (kabaligtaran ng motor) at dapat itong maantala sa isang karagdagang cable na na -load sa may hawak ng cable, upang ang baluktot na stress ay maaaring mabawasan ito. Ang radius ng siko ng cable ay dapat na kasing laki hangga't maaari
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు