Általános műszaki jellemzők
● A léptetőmotort alacsony sebességű alkalmakkor használják --- A sebesség nem haladhatja meg az 1000 fordulat / perc sebességet (6666pps 0,9 foknál), és a legjobb, ha azt 1000-3000pps (0,9 fok) között használja. A motor magas működési hatékonysággal és alacsony zajjal;
● A legjobb, ha nem használja a léptetőmotor teljes lépési állapotát, és a rezgés teljes lépésben nagy;
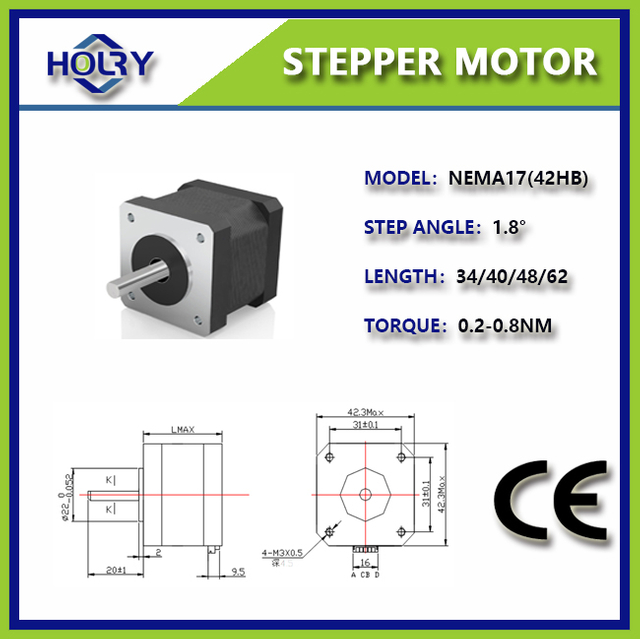
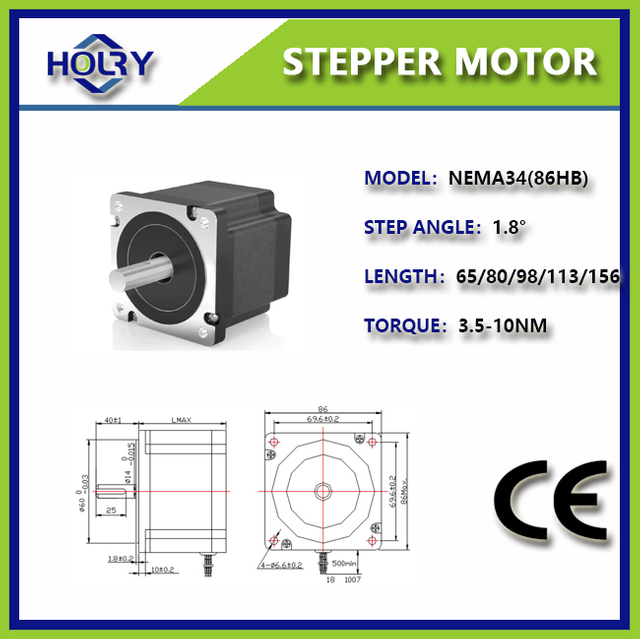
● A motor specifikációjának feszültségértéke nem a vezetési feszültség értéke. A konkrét vezetési feszültséget a léptetővezető szerint lehet kiválasztani (ajánlás: 42 és annál alacsonyabb motorok 12-24 V, 57 motor használja a DC 24V-48V-t, 86 Használjon DC 48-80V, 110 A motor magasabb, mint a DC 80V)
● Nagy tehetetlenségi momentumokkal rendelkező terhelések esetén nagy keretméretű motort kell kiválasztani;
● Ha a motor nagy sebességű vagy nagy tehetetlenségi terhelés alatt van, akkor általában nem a működési sebességgel kezdődik, hanem fokozatosan növeli a frekvenciát és a sebességet. Először is, a motor nem veszíti el a lépéseket. Másodszor, csökkentheti a zajt és javíthatja a leállítás helymeghatározási pontosságát;
● Nagy pontosság esetén azt mechanikai lassulással, a motor sebességének növelésével vagy a nagy felosztású járművezető használatával kell megoldani;
● A motornak nem szabad működnie a rezgési területen, ha szükséges, akkor megoldható a feszültség megváltoztatásával, az árammal vagy a csillapítás hozzáadásával;
● Amikor a motor 600pps (0,9 fok) alatt működik, akkor azt kis áram, nagy induktivitás és alacsony feszültség vezérli.
Mechanikai műszaki jellemzők
● A csatlakozó rész telepítése/eltávolításakor a léptetőmotor tengelyének végével ne nyomja meg közvetlenül a tengely végét. (A kalapács közvetlenül eléri a tengely végét, és a léptetőmotor másik végén lévő kódoló megsérülhet);
● Próbálja meg igazítani a tengely végét a legjobb állapothoz, hogy biztosítsa a jó koncentrikusságot, különben rezgés fordulhat elő, a csapágyak megsérülhetnek, vagy akár a tengelyek megsérülhetnek;
● A motor használható olyan helyeken, amelyeket víz vagy olajcseppek támadnak meg, de ez nem teljesen vízálló vagy olajbiztos. Az alapértelmezett védelmi szint az IP54. Ezért a motort nem szabad vízzel vagy olaj által rontott környezetbe helyezni vagy használni (ha szükséges, speciális védelmi szint, kérjük, vegye fel velünk a kapcsolatot!);
● Ha a motort egy redukciós fogaskerékhez csatlakoztatják, akkor azt olajjal kell lezárni, amikor léptetőmotorral megakadályozzák a redukciós felszerelést a léptetőmotorba;
● Ne merítse a motor kábelt olajba vagy vízbe. Győződjön meg arról, hogy a kábelt nem szabad pillanat vagy függőleges súlynak kitéve a külső hajlítóerő vagy a saját súlya miatt, különösen a kábel kimenetén vagy a csatlakozásnál.
● A motoros mozgás esetén a kábelt (azaz a motorral járó) biztonságosan rögzíteni kell egy helyhez kötött részhez (a motorral szemben), és azt egy további kábellel kell késleltetni, hogy a kábeltartót behelyezzük, hogy a hajlítási feszültség minimalizálható legyen. A kábel könyök sugara a lehető legnagyobbnak kell lennie
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు