Ciri -ciri teknikal umum
● Motor stepper digunakan dalam keadaan berkelajuan rendah --- kelajuan tidak boleh melebihi 1000 rpm, (6666pps pada 0.9 darjah), dan lebih baik menggunakannya antara 1000-3000pps (0.9 darjah). Motor mempunyai kecekapan kerja yang tinggi dan bunyi yang rendah;
● Adalah lebih baik untuk tidak menggunakan keadaan penuh motor stepper, dan getarannya besar dalam keadaan penuh;
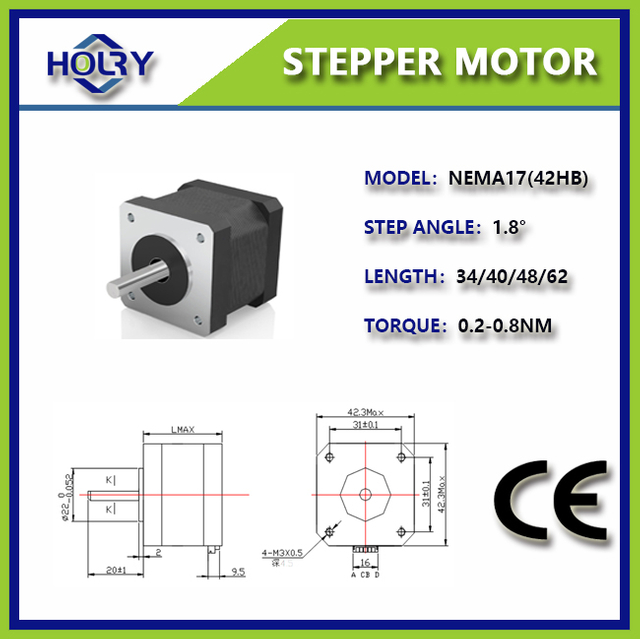
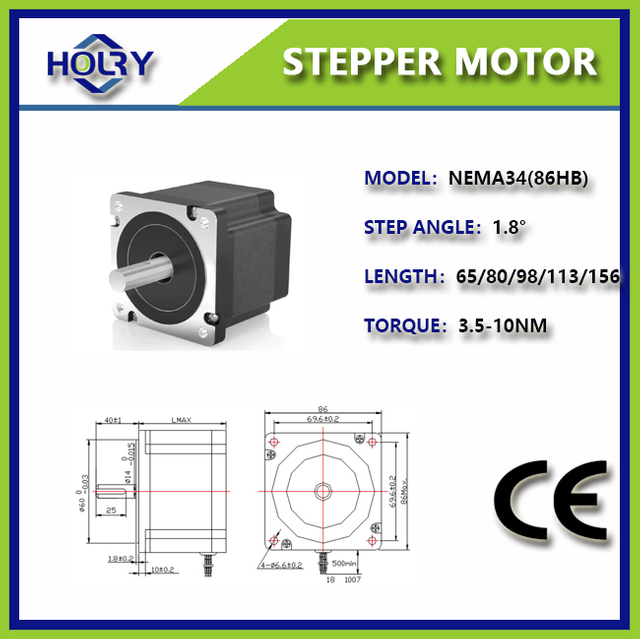
● Nilai voltan spesifikasi motor bukanlah nilai voltan memandu. Voltan memandu khusus boleh dipilih mengikut pemacu stepper (cadangan: 42 dan di bawah motor menggunakan 12-24V, 57 motor menggunakan DC 24V-48V, 86 Gunakan DC 48-80V, 110 Motor menggunakan lebih tinggi daripada DC 80V)
● Untuk beban dengan momen inersia yang besar, motor saiz bingkai yang besar harus dipilih;
● Apabila motor berada di bawah kelajuan tinggi atau beban inersia yang besar, ia secara amnya tidak bermula pada kelajuan kerja, tetapi secara beransur -ansur meningkatkan kekerapan dan kelajuan. Pertama, motor tidak kehilangan langkah. Kedua, ia dapat mengurangkan bunyi bising dan meningkatkan ketepatan kedudukan berhenti;
● Sekiranya ketepatan yang tinggi, ia harus diselesaikan dengan penurunan mekanikal, meningkatkan kelajuan motor, atau menggunakan pemandu dengan subdivisi yang tinggi;
● Motor tidak boleh berfungsi di kawasan getaran, jika perlu, ia dapat diselesaikan dengan mengubah voltan, arus atau menambah beberapa redaman;
● Apabila motor berfungsi di bawah 600pps (0.9 darjah), ia harus didorong oleh arus kecil, induktansi besar dan voltan rendah.
Ciri -ciri teknikal mekanikal
● Apabila memasang/mengeluarkan bahagian gandingan dengan aci aci motor stepper, jangan tekan hujung aci dengan tukul secara langsung. (Hammer secara langsung mencecah aci aci, dan pengekod di hujung batang motor stepper boleh rosak);
● Cuba menyelaraskan aci yang berakhir dengan keadaan terbaik untuk memastikan persetujuan yang baik, jika tidak, getaran mungkin berlaku, galas mungkin rosak, atau bahkan aci boleh dipecahkan;
● Motor boleh digunakan di tempat-tempat yang akan diserang oleh air atau titisan minyak, tetapi ia tidak sepenuhnya kalis air atau bukti minyak. Tahap perlindungan lalai ialah IP54. Oleh itu, motor tidak boleh diletakkan atau digunakan dalam persekitaran yang terhakis oleh air atau minyak (jika tahap perlindungan khas yang diperlukan, sila hubungi kami!);
● Jika motor disambungkan ke gear pengurangan, ia harus dimeteraikan dengan minyak apabila menggunakan motor stepper untuk mengelakkan gear pengurangan memasuki motor stepper;
● Jangan tenggelam kabel motor dalam minyak atau air. Pastikan kabel tidak tertakluk kepada momen atau berat menegak kerana daya lenturan luaran atau beratnya sendiri, terutamanya di saluran kabel atau sambungan.
● Dalam kes pergerakan motor, kabel (iaitu, yang dilengkapi dengan motor) harus diikat dengan selamat ke bahagian pegun (bertentangan dengan motor) dan ia harus ditangguhkan dengan kabel tambahan yang dimuatkan dalam pemegang kabel, supaya tegangan lentur ia dapat diminimumkan. Jejari siku kabel mestilah sebesar mungkin
 English
English Русский
Русский العربية
العربية Français
Français Español
Español Português
Português Deutsch
Deutsch italiano
italiano 日本語
日本語 한국어
한국어 Nederlands
Nederlands Tiếng Việt
Tiếng Việt ไทย
ไทย Polski
Polski Türkçe
Türkçe አማርኛ
አማርኛ Bahasa Melayu
Bahasa Melayu தமிழ்
தமிழ் Filipino
Filipino Bahasa Indonesia
Bahasa Indonesia magyar
magyar Română
Română Čeština
Čeština हिन्दी
हिन्दी فارسی
فارسی Kiswahili
Kiswahili Slovenčina
Slovenčina Slovenščina
Slovenščina Norsk
Norsk Svenska
Svenska українська
українська Ελληνικά
Ελληνικά Suomi
Suomi עברית
עברית Dansk
Dansk বাংলা
বাংলা Hrvatski
Hrvatski Afrikaans
Afrikaans Gaeilge
Gaeilge Eesti keel
Eesti keel Māori
Māori සිංහල
සිංහල Azərbaycan dili
Azərbaycan dili Euskara
Euskara Беларуская мова
Беларуская мова Български
Български guarani
guarani Kreyòl ayisyen
Kreyòl ayisyen Kurdî
Kurdî Lietuvių
Lietuvių Македонски
Македонски తెలుగు
తెలుగు